- 文字サイズ
- 小
- 中
- 大
朝日ニュースター
2011年07月17日
==============================================
朝日グループのジャーナリズムTV「朝日ニュースター」は、通信衛星などを利用して24時間放送しているテレビチャンネルで、ケーブルテレビ局やスカパー!などを通じて有料視聴することができます。4月から始まった新番組「科学朝日」は、高橋真理子・朝日新聞編集委員がレギュラー出演する科学トーク番組です。WEBRONZAでは、番組内容をスペシャル記事としてテキスト化してお届けします。
====================================================================

ゲスト 東北大学大学院教授 田所諭さん
高橋:こんばんは。科学の最先端にひたる「科学朝日」。今回のテーマは「災害対応ロボット最前線」です。東日本大震災で災害対応ロボットはどれほど活躍したのでしょうか。福島第一原発事故の対応にはアメリカのロボットが投入され、若干残念な気持ちもしましたが、ようやく日本のロボットにも出番がきました。そのロボットを開発された、災害対応ロボット研究の第一人者、東北大学大学院教授、田所諭(たどころさとし)さんを今日はお迎えしました。田所さんよろしくお願いいたします。
田所:よろしくお願いいたします。
高橋:東北大学は今回の震災でずいぶん被害を受けたと聞きましたけれども、田所さんの研究室はどうだったんでしょうか。
田所:うちの研究室はフライス盤という工作機械がありまして。ロボットを作るための工作機械なんですが、それが倒れました。それで建物の4階に研究室があるんですけども、よく床が抜けなかったなと安心した次第です。
高橋:重たいものですよね。
田所:そうですね。鉄の塊ですから。もしも床が抜けていたらその下の研究室は非常に大変な状況になっていたと思います。
高橋:そうですか。
田所:はい。
高橋:その後の復旧作業は順調に進んだんですか。
田所:そうですね。私が住んでいる建物は幸いに構造は大丈夫だったものですから、片付けをして話がすんだということなんですが。ただ、建物によってはエレベーターが落ちたところもたくさんありまして、被害総額にして、建物被害が400億円。それから設備の被害が300億円という、莫大な被害が出てます。
高橋:そうなんですね。そんな中で、今回、災害対応ロボットの研究者として、早々といろいろ活動なさってきたと聞いておりますけれども。
田所:そうですね。災害対応ロボットの研究というのは非常に因果なもので、自分が被災しようとどうしようと、やはりそれが使われるために、災害が起きた直後からいろんなことをやらないといけないという、そういう宿命がある分野だと思うんです。私、阪神淡路大震災でひどい目にあいまして、それ以来この分野をやってきたわけですけれども、今回もなんとかお役に立とうということで、いろんなことをやってまいりました。
高橋:はい。いよいよ福島第一原発での日本のロボットの投入ということになりました。
田所:はい。
高橋:コマーシャルの後にそのお話しを詳しく伺いたいと思います。いったんコマーシャルです。
(CM)
高橋:「科学朝日」本日のゲストはこの方、東北大学大学院教授、田所諭さんです。
田所:よろしくお願いいたします。
高橋:よろしくお願いします。福島第一原発事故、今後どうなるのかみんなが心配していると思います。まずは一刻も早い終息が必要なわけですけれども、そのためには人が入れない放射線量の高いところではロボットに活躍してもらうしかない。そういうことは、早い段階からみんな言っていました。最初に投入されたのはアメリカ製のロボットでした。われわれ日本人としては、ロボットは日本のお家芸であると考えていたので、なんだか残念な気持ちがしたんですけれども。なんでアメリカのロボットが最初に投入されたんですか?
田所:まず、誤解を解いておきたいんですけれども。アメリカのロボットが最初かというと、必ずしもそうではないんです。日本には無人化施工という技術がありまして、建設機械をロボット化したものというのがあるんです。これは1990年代の初めから使われていて、日本はトップレベルの技術を持っています。これは福島原発で非常に初期から外部の瓦礫(がれき)を片付けたりといったことにずっと使われてきてるんです。ですからアメリカのロボットが最初かというと、必ずしもそうじゃないんじゃないかなと思います。
高橋:なるほど。
田所:ただ、屋内に入るような小型のロボットについては、日本は実用化して配備している機械というものがないんです。あるいは日本がそれを商売として、商品として売るようなそういう会社というのが存在しないものですから、最初に入ったのはアメリカのロボットということになったんです。東京電力の側からしてみると、いろんなミッションがあって、それを確実にやらないといけない。従ってたくさんの選択肢がある中で最もそれに適したものを選んで、かつ、最も確実にできそうなものを選んで、それで使うというのが正しい選択の方法だと思うんです。
高橋:そうですね。
田所:そうすると、まずPackbot(パクボット)というロボットはイラクといったところに3千台も使われていて、それで非常に実績がある。信頼性も高い。最初のミッションというのはなんだったかというと、二重扉を開けて、その中の線量を調べるという極めて単純なミッションであると。これはPackbotで十分に遂行が可能であるっていうのは誰が考えても明らかで。従ってそれを使うというふうに判断されたのは極々正当じゃないかなと思うんです。
高橋:じゃあ、今度投入されることになった、先生が開発されたロボット。これはそれもPackbotにはできないことができるわけなんですね。
田所:そうですね。ミッションが何かというと、水がたまっているところに水位計を設置する。それから汚染された水を採取するという、そういうミッションです。これをやるためには、例えば1号炉から3号炉までの地下に水がたまっています。これをやるためにはロボットは地下の階段をずっと伝って下りていって、それで何かをやらないといけません。これができるロボットというのは、実はPackbotでもできなくはないかもしれないんですけども、ともかくも運動性能が高くないと駄目なんです。階段の傾斜が四十何度ありまして、ほとんど上から見ると崖のような、そういう工事現場とかにありそうな階段なんです。ですからそういったところで安定して、ちゃんと確実に下りられるというのは、日本の技術を使ったQuince(クインス)だというふうに考えています。
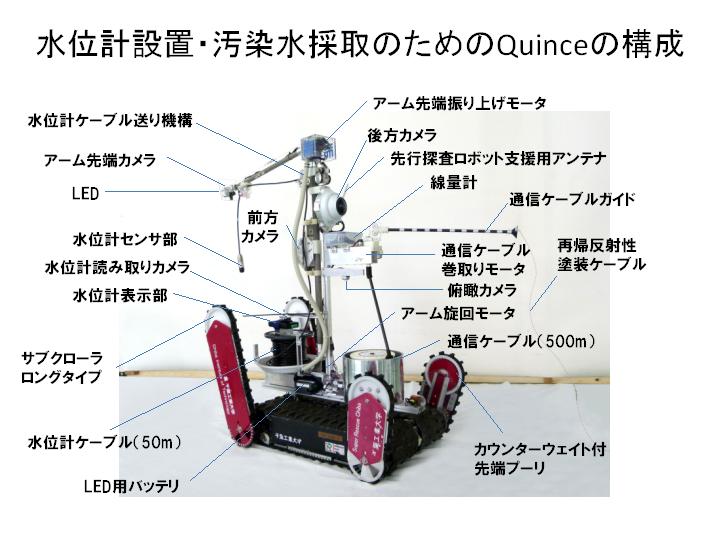
それでどうなっているかというと、ここにクローラが付いたメインボディーがありまして。このクローラが、このメインクローラに加えて、サブクローラというものが前後に付いてます。手と足のようなものです。このボディーの上にカメラとか、カメラも前方見たり後方見たり、いくつも付いてます。それに加えて、ここに水位センサーがあります。これがセンサー本体なんですけども、この鉄の、このくらいの塊です。
高橋:そこにぶら下がっているんですね。
田所:そうです。ここにケーブルがずっと付いてて、ケーブルリールがここにあって、ここに巻き取られてると、こういうものなんですけども。それから、ここには出てませんけれども、水を採取するためのボトルというのがここに付けられるようになっています。どういうふうにしてミッションを果たすかというと、まずこのロボットが階段をある程度のとこまで下りていって、それで手すりの隙間からこの水位センサーをずーっと下ろしていって、それで地下の一番下のところまで届けると。それが終わったら、このケーブルを繰り出しながらこのロボットはずーっと地上まで上がってきて、それで地上にこのリールと、それからセンサーのモニターとを置いてくるという、そんなふうなミッションなんです。
高橋:そのセンサーはケーブルにつないだ状態じゃないと使えないんですか。
田所:そうですね。無線とかそういうものができないのかとよく言われるんですけれども、原子炉の中はそういう放射線の遮蔽(しゃへい)がなされています。放射線が届かないということは、要するに電磁波も届かない、電波も届かないということなので、そういった電波を使ったものってなかなかうまくいかないんです。だからこのロボットも無線で操縦することはできるんですけども、そういう地下で安定に動かすためには、有線ケーブルでコントロールするということになっていまして、ここに通信ケーブルが500メートル巻いてありまして、それでここから、しっぽのようなところからずっとケーブルを繰り出していくということなんです。
高橋:そうなんですか。
田所:あと、水をサンプリングするのも同じようにこの辺から釣り糸でボトルを垂らしまして、それで水の中に漬けて、それでくんでくるというそんなふうなシステムになっています。
高橋:それは持ち帰ってくるわけですね、当然。
田所:そうです。これを実際に動かしたとこのビデオがありますので、それを見てみたいと思います。
高橋:はい、ぜひ。
(ビデオ上映)
田所:こういう形で、今これ実験室の中から出てきてますけれども、このロボットは今から階段を下りていって、それで水位計を設置するということをやります。ここに下がっているのが水位計でして。このぶらぶらしているこれです。まずロボットは階段を下りていきます。この階段は傾斜がそれほど急じゃないので、まだ楽なんですけども、実際の現場は斜度が四十何度という斜度でして、かつ、下が鉄板でできてるんです。
高橋:滑りやすい。
田所:非常に滑りやすい。つるつるのところを下りていかないといけないということで、人間はできるんですけれども、ロボットでこれができるものっていうのはほとんどありません。
高橋:重さのバランスとかが微妙ですよね。
田所:そうなんです。
高橋:頭からひっくり返って落っこちそうな感じしますよね、頭が重たいと。
田所:そうなんです。実はこのロボットは非常に運動性能が高いというふうに自慢をしているんですけれども、その理由というのは重心が低いから運動性能が高いというのが一つの理由なんです。ところが、このミッションをやろうとすると、27キログラムというボディーの上に23キログラムのこういういろんなアームであるとか、リールであるとか、いろんなものをごてごてと乗っけないといけなくなってしまって、それで非常に腰高になってしまっているんです。
高橋:そうなんですか。
田所:腰高になってしまうとどうしても転びやすくなります。それでは駄目だというんで、転ばないように、例えば腕を長くして、ボディーの長さを長くして、それを支えることができるようにするとか、あるいはカウンターウエイトというものを入れて、それで倒れないように重量のバランスを取るとか、そんなふうなことをやらざるを得なかったんです。今、水位計のセンサーを、アームを使って操作をしていますけれども、操縦する人はこの水位計の動きとか、あるいは下がどうなっているかとか、そういったのをカメラで見ることができるようになっています。そのカメラの映像を見ながら位置合わせをして、それでどんどんケーブルを繰り出していくということをやるわけです。ケーブルをずっと繰り出してって、原子炉建屋の地下の底に着いたら、今度はケーブルを繰り出しながら、またロボットはずっと階段の上まで上がってくるという、そんなふうな手順になります。これは次のビデオなんですけれども。
高橋:ちょっと違いますね、さっきのと。
田所:そうですね。先ほどのものは、有線でコントロールされるタイプのロボットでした。ところがこれは無線なんです。それで2階とか3階とかを、中を見るというそういうふうな仕事もしないといけません。
高橋:原発の中でですね。田所:原発の中です。それをしようとすると、ケーブルを引きづりながら行くというのはなかなか制約が多過ぎて難しいんです。つまり中に落ちている瓦礫であるとか、あるいはその計器とか、いろんなものにケーブルが引っ掛かってしまうと、それで障害になってしまいます。ですから、できれば無線で操縦をしたいんです。ところが無線は先ほど申し上げましたように、原子炉建屋の中だとほとんど届かないんです。ロボットは見えてる見通しだと届くんですが、そうじゃないと届かない。仕方がないので有線ロボットのほうに中継器を設けまして、有線ロボットから見えている範囲内でこの無線ロボットを動かすということで、仮に瓦礫とかいろんなものが落ちていても、それを乗り越えながら、その奥をこのロボットが見ていくことができるということなんです。
高橋:ロボットの連携プレーっていうことになるんですね。
田所:そうですね。やはり2台使いますと、こちらのロボットはどう動いてるかということを見ながら操縦することができますんで、非常に楽になります。
高橋:なるほど。
田所:それからそれに加えて、前にぐるぐる回っているセンサーがありますけれども、これが3次元の形を計るセンサーなんです。ですから部屋の中、建屋の中がどんなふうな形になっているのか、壁がどこにあるかとか、そこまでの距離はどうであるかとかそういったことをこの3次元のセンサーを使って見ることができます。だからその情報と、カメラの情報とを使いながら、奥深くまで探査をしていくということができるという、そのようなシステムです。
高橋:扉を開けるっていう作業はできるんですか、これ?
田所:扉は開けられません。
高橋:開けられない。そこは人間が行って開けてあげないといけないんですね。もし扉がある場合は。
田所:そうです。後でご紹介しますけれども、扉を開けるロボットというのを別途開発をしていまして。ですからそれを投入すれば、それで、例えばポンプ室とかにありますけども、そういった重たい扉も開けることができるというふうに思っています。
高橋:そうなんですか。
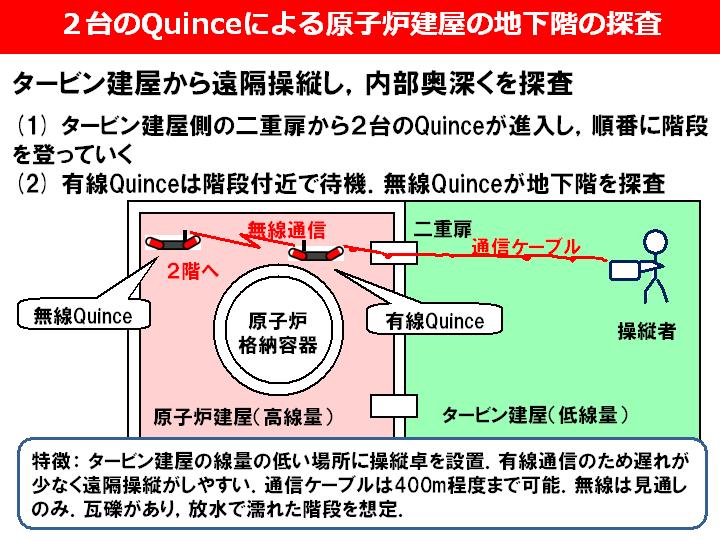
田所:今の構成がこれです。これご覧いただきたいんですが、今有線ケーブルで操縦する人がこちら側のタービン建屋のほうにいまして。こちらは線量が低いんです。そこから通信ケーブルでずっと伸ばしまして、この有線ケーブルでコントロールされているQuinceが動くと。ここから無線を中継しまして、それでこちら側のQuinceが動くところです。ですから2階とか地下奥深くとか、そういったところにこれを入れることができるという、そんなふうな構成になっているということです。
高橋:なるほど。最初の地下水をくんでくるのは、無線は使わないわけですね。
田所:そうですね。無線は使わずに、こちら側のこの1台だけで行うという、そういうミッションです。ですからいろんなリクワイアメントがあるわけで、それに合わせて適宜このロボットの構成を変えながら、組み合わせとか、あるいは上に乗せるものとか、そういったものを変えながらミッションを果たしていくというのが求められてることなんです。
高橋:今回のQuinceは福島第一原発のために、その仕様で作ったものになるんですか。
田所:いや、実はそれはそうじゃないんです。
高橋:あー、そうなんですか。
田所:実はこれはNEDO(新エネルギー・産業技術総合開発機構)というところのプロジェクトで開発をしたものです。その映像をちょっと見ていただきたいんですけども。NEDOの閉鎖空間内高速走行探査群ロボットとちょっと・・
高橋:長いですね。
田所:名前が長いんですけども。要するに閉鎖空間、例えば地下街とか、あるいはデパートの中とか、そういったところでガス漏れなどが起きたと。あるいは極端なケースでいうと、地下鉄サリン事件みたいなそういうものがばらまかれたというケースで、消防隊員の方が中に入って調べると被災をしてしまうと。そういう危険が予測されるときに、まず最初にロボットを入れて、それで中を調べてくるという、そういうふうなことを目的として開発したものなんです。
われわれ2つのロボットを開発したんですけども、それを開発するにあたって、いくつかの技術的な課題がありました。1つは走行の性能なんです。それから、先ほど言われていたような、ドアを開ける機能です。これは絶対にないとできないと。それから遠隔操縦は楽じゃないといけないということがあります。ロボットはある程度自立性を持っているので、遠隔操縦を支援してやろうということです。それから無線が届かないともちろん何もできないと。それから情報を収集するのが目的ですから、その情報収集をしたものを地図の情報システムに全部集約をして、外部から見ることができるようにするということが求められているんです。当然ですけども、耐久性とか、あるいは防水とか防塵とか、そういったのは当たり前のことですが、非常に重要であるということです。われわれはこれを・・
高橋:これですね。扉を開けられる。
田所:そうです。今のロボットはドアをまず回して、回した後に今度はおなかのとこに吸盤がありまして、それでドアを引っ張って開けているんです。それによって重たい鉄のドアでも開けることができます。それから、これはQuinceの前のバージョンのケナフというロボットなんですけれども、これ非常に高い運動性能を誇ってます。こんなふうな非常にがたがたした瓦礫とか、こんなところでも自由自在に動くことができるんです。今お見せしてるのは、Disaster City(ディザスタシティ)というアメリカの救助隊の方の訓練施設なんです。世界最大の訓練施設で、倒壊した瓦礫、40メートル四方ぐらいに木材とかコンクリートとかそういった瓦礫まで用意をされていて、そこで訓練ができるようになっています。
高橋:これは日本の実験ですね。
田所:そうですね。これは防災科学技術研究所が持っている、大規模振動台というところで、木材家屋を倒す実験をしたんですけども、そこでわれわれのロボットを実際にテストをしたということです。それから、これ今階段上ってますけども、これは操縦する人は前に行けとか右に曲がれとかそれを言うだけで、自分で階段を上ったり下りたりしてくれるんです。
高橋:声に反応するんですか。
田所:声じゃなくて、操縦をするときに、普通ですと腕とかを上げ下げをするというのを人間が全部指示しないといけないんですが、それは非常に難しいと。従ってそこまでやらなくても自分で考えて動いてくれるということです。
高橋:なるほど。
田所:それから、3次元のマップを作るという機能がありまして。3次元の形状を計測することで、例えばロボットが動いているところは壁まで何メートルあるかとか、そういうことを知ることができるということです。そういった集めた情報というのは全部地図のシステムに統合されて、今お見せしているやつはロボット3台から集めたデータなんですけども、そういう複数台からのロボットとか、あるいは人間が集めたような地図の情報も全部統合して、それで実際に役に立てることができるという、そんなふうなシステムになっています。当然ですけれども、こういったロボットは消防隊員の方とか、あるいは自衛隊の方々の・・
高橋:持ち運びができなきゃ駄目なんですね。
田所:道具ですからね。それは確かにゼロから操縦してってもいいんですけど、それじゃ時間がかかってしまうと。そうじゃなくて、20キロとか30キロとかそのぐらいの重量に押さえて、それで隊員の方々がそこまで持っていって、そこですぐさま使えるという・・
高橋:簡単に使えないと駄目ですよね。
田所:はい。
高橋:誰でもが操縦できないと。
田所:これはドアを開けることを目的として作ったUMRSというロボットなんです。こんなふうな操縦のシステムで、例えばこういった地図の中を見ながら、こういったジョイスティックで操縦することができますね。
高橋:ゲームと同じじゃないですか(笑)。
田所:これは実に使いやすいんです。
高橋:あのゲームの。
田所:ええ。みんな慣れてますから、なんといっても。
高橋:なるほど。これならすぐにできますね、誰でも。
田所:ええ。先ほどのジョイスティックを使って、こんなようなドアを開けたりとか、そういったこともできるような、そういうシステムになっています。例えばマニピュレーターなんかも作ってまして。こういうふうなペットボトルが落ちてると。怪しいペットボトルを、例えば拾い上げて、それで持って帰ってくるとか、そういったようなこともできるような形になっています。
高橋:一つのロボットでいろんな機能をオプションで付けたり外したりできるっていうことなんですか。
田所:2種類のロボットなんです。ですからQuinceと、その前のバージョンのケナフというロボットが1つです。これは運動性能が非常に高いということを特徴にしています。それからこのUMRSというロボットはドアが開けられるということを特徴としているんです。運動性能が高いロボットでドアを開けさせるのは、やっぱり性能として相反するところがありまして。両方満たすのはなかなか難しいんです。これは立川にあるハイパーレスキューの方の訓練所なんですけども、こういうところでデモをしたりとか、あるいはこれ千葉の消防局ですけれども、こういったところで実際に訓練に使ってもらったり、そういったことをやってます。このQuinceに関しては、半年間ぐらい千葉消防で使われていますし、UMRSというロボットは神戸消防でまた数カ月間テストがされています。こういうふうな形で現場性能をどんどんと鍛えていくことで、実用化を図るというのがこのプロジェクトの目的だったんです。これは平成22年度の末までということで・・
高橋:今年の3月までですね。
田所:はい。3月20日までというのが、その契約の期間だったんですけども。
高橋:何年間のプロジェクトだったんですか。
田所:5年間のプロジェクトですね。5年間で、最終年度としては消防とかに預けて、それでちゃんと訓練ができる実用的な性能を発揮できるという、そこを目指して開発をしてきたわけなんです。
高橋:それは達成できたわけですね。
田所:はい。実はそれの最終の実験というのが3月の9日に行ったものなんです。これもアメリカのDisaster Cityというとこでやったものなんですが、運動性能っていうのはともかくもやっぱりこの種のロボットにとっては命なんです。われわれはコンクリートの瓦礫については40メートル四方、端から端まで渡って動かすようにできていたんですけども、木材がなかなかうまくいかなかったんです。
高橋:そうなんですか。軟らかいとかえってうまくいかないんですか。
田所:そうですね、軟らかいだけじゃないんですけれども、非常に大きなギャップがあるので、そこを乗り越えないといけないということなんです。このQuinceはそれができるはずだというんで、それでもう年度末のプロジェクトが終わるというときに集大成として、この瓦礫を端から端まで動かしたいということで、ここに行って、そいで実験して成功して帰って来たわけなんです。今これコンクリートの上とか平気に動いてますけども、実はアメリカのロボットとかをこういうとこで動かすと、あまりうまくいきません。
高橋:そうなんですか。
田所:はい。ですから運動性能ということでいくと、このQuinceというロボットは非常に優れた性能を持っています。
高橋:アメリカのロボットもこういう似たような形のものがあるんですか?
田所:そうですね。Packbotという原子炉建屋の中で使われたロボットは腕が前だけしかない形のロボットなんですけれども、比較的似た形をしてます。ですけれども、運動性能は相当に大きな開きがあります。
高橋:前と後ろにあるということで、格段に性能がよくなるということなんですか。それ以外にももっと何かあるんですか。
田所:いや、それだけじゃないです。さまざまなありとあらゆる工夫がされて。
高橋:すごいですね。こんな急なところも。
田所:そうですね。例えば普通のロボットだとこういうところで、横にずれて倒れてしまったりするんです。だけど、このロボットだと70度ぐらいまで傾けても実は転げ落ちないんです。
高橋:それは材質ですか、この。
田所:まず重心の位置がどこにあるかとか、あるいはこのクローラ、これはちょっとコンクリートのために違う材質を使った、ゴムのベルトなんですけれども、そういう材質によって変わるというところもありますし。さまざまな工夫がなされているということですね。
高橋:あ、がんばってますね、これは。
田所:ええ。まあこんな形で。
高橋:なんとかやってくわけですね、こういうところで。
田所:そうですね。腕がありますから、腕で「よいしょ」っとよじ登る。若干何か動物的な感じもしますけれども、われわれは動物にまねたものを作りたいわけではなくて。要するに運動性能が非常に高いものを作りたいということなんです。こんなような階段というのがその原子炉建屋の中にはたくさんあるんです。ですからこのタイプの階段の中で、うまく動けるような性能が原発の建屋の中では求められているということです。
高橋:これが3月9日までにできていた。
田所:そうなんです。実はこの実験をやるためにアメリカに行ってたわけなんですが、それでもう実験が終わって帰ってくるという、次の日の朝には飛行機に乗るというときに、地震の第一報が入りまして。それで慌てて帰ってきたっていう次第なんです。
高橋:まずは原発よりも被災地のほうで活躍させようということだったんですか。

田所:そうなんです。われわれこれを作った目的というのは、そもそもレスキューロボットやってきたきっかけというのは、阪神淡路大震災です。あのとき倒壊した建物で90%ぐらいの方が亡くなっているんですけれども、そういった建物の中にいる人を救い出すことが目的だということで、一生懸命研究開発をしてきたんです。ですからこのQuinceというのも、やっぱりそういったところで使いたいという思いが非常に強くて。ですから、私が仙台に帰ってきたのは地震が起きて40時間後でした。40時間後には、後でお見せするノードスコープカメラというロボットを仙台市の消防局に持っていきまして、これ彼らと共同で改良開発をしているんですけども、そういう狭いところを探すロボットなんですが、それが使える場所がないかということを彼らに聞いたんです。ところがそれは実は全然そういうところがなかったと。実際にはその時点で必要なのは、津波で孤立した建物の中に取り残されている人をどうやってヘリで救出するかという、そういったことが非常に大きなミッションでした。ですから、われわれ震災で崩れた建物ばっかり考えていたわけですけれども、今回はちょっと出る幕がなかったというところなんです。とはいっても、そんなことは言っていられなくて。実はこの映像は東北大学の被害の様子なんです。こんなふうな崩れた建物たくさんありまして。これは私の隣の隣にいる教授授室の中なんです。こんなふうな状況だったんです。ですから、こういうふうな被害の状況をロボットを使って調査をしようということで、ロボットを投入して、実験をしたといったほうが正しいかもしれませんけれども、そういうデータを取ったりしました。ちょっと画面切り替えていただきたいんですが。
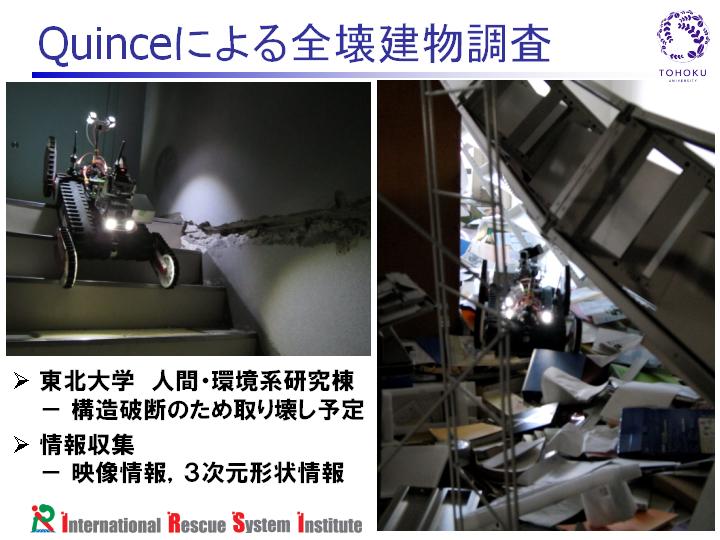
これですね。これ見ていただきますと、もうぐじゃぐじゃになっていますね。こういったところにロボットを入れまして、どんなふうに崩れているかとか、あるいはこういうクラックがある場所の形とか大きさとかを計ったりとか、そんなことをやったという次第です。
高橋:今回は実験ということは、これで人がどっかに閉じ込められちゃったとか、そういうことはなかったということなんですね。
田所:そうですね。今回は、確かに全壊の建物はたくさんあるんですけども、そんなにものすごくぐしゃっとつぶれているというケースは非常にまれであると。ですから押しつぶされて亡くなった方の数というのは非常に少ないんです。その辺が阪神大震災との大きな違いです。
それで、われわれこれをやるためにNPOをつくって、いろんなことをやってきました。今ご紹介したことのほとんどは、そのNPOを中心としてやったことで、NPOのほうから例えばいろんな政府機関や自治体にこういうロボットがあるけれど、使えるところはないかということを聞いたりとかいろいろして、それで実際に使える場所を探すということをやってきたんです。
そのNPOがやってきた非常に大きなこと、今までの研究というのをご紹介したいんですけれども。このNPOがやった一番大きな仕事というのは、文部科学省の大都市大震災軽減化特別プロジェクトというのがありまして、その中でレスキューロボットの開発というのをやったことなんです。日本で、大学の先生方が多かったんですけども、100人以上の方に集まっていただいて、オールジャパンの体制でレスキューロボットの開発をやったんです。実はそれ以前は日本はこの種のロボットっていうのはあまり研究はやられていなくて。それで、このプロジェクトによって初めて日本のこの種の研究というのが世界のトップレベルに躍り出たという、そういう研究なんです。
その中でやってきたことは、要するに瓦礫の中の情報、あるいは災害の概観情報といいますか、そういったものを集めてくるという情報収集の手段なわけです。例えば瓦礫の中ですと、ヘビ型ロボットで中に潜り込んでいって、瓦礫の中を調べるものでありますとか、あるいは先ほどのQuinceのようなタイプの、地下街とかに入って調べてくるようなロボット、そういったものを開発したんです。ですから、Quinceが今回原発に入る入らないというのも、この大都市大震災軽減化特別プロジェクトという、そういうふうなものがあったから初めてできたんだというふうにいうこともできると思います。
高橋:それは阪神大震災の直後にやったプロジェクトなんですか。
田所:2002年から2006年度までです。
高橋:NEDOのプロジェクトは
田所:2006年。
高橋:それを引き継ぐ形でできたっていうことなんですね。
田所:そうですね。引き継ぐ形ですね。
高橋:そうなんですね。2002年度に始めるときにはNPOの働きかけがあって、そういう大きなプロジェクトが始まったっていうことなんですか。
田所:そのプロジェクトが始まるとほとんど同時なんですけども、このNPOが発足したのが。
高橋:じゃ、その大きなプロジェクトをやるのだからっていう形で発足したんですか。
田所:そうですね。ですから、われわれやはりこれをマネジメントする組織が必要で、それでいろんなやり方はあったと思うんですけれども、当時国の研究所でこの種のロボティックスをやっている研究所っていうのは一つもありませんでした。かつ、企業ができるかというと、企業はやはりもうからないとできないというものがあるし、大学は研究する分はいいんですけども、実用化というところで非常に大きな問題点がある。
高橋:そうですね。弱いですよね。
田所:だから結局そういった問題点を埋めるものが何なんだろうというのが、研究代表者としての私の悩みだったんです。NPOという制度ができたことだし、そういうふうな形を取って、みんなの協力を取りつけて、みんなでやっていくことはできないかっていうのが、これをやり始めたきっかけなんです。
高橋:それは大学のプロジェクトのやり方として、一つのモデルになりますね。
田所:そうですね。
高橋:やっぱり大学の研究って、基礎研究が多くて実用につながらないのが大きな欠点の一つと指摘されながら、なかなか改善しないでずっとここに来たと思うんですけども。
田所:そうですね。
高橋:この研究の場合は災害救助、災害支援という目的がはっきりしていますから、それを実現するにはNPOっていう形、非常に素晴らしいと思います。
田所:私クリアに覚えているのは、そのときに担当された文部科学省の官僚の方なんですけれども、その方がこんなこと言われたんです。田所先生、これはロボットのプロジェクトじゃありませんと。ロボティックスのプロジェクトじゃありません。従って、ロボティックスの論文は1本も出なくとも構いませんと。だけれども、これは防災のプロジェクトなんだから、災害に役に立つ、防災に役に立つ成果を出してくださいと。それがこの目的なんですと言われたんです。私は非常にそこでがくぜんとしたというか、なんといいますか、非常にそれは重い言葉だというふうに受け止めて。従って消防の方と一緒になって、これを実用化する努力をするとか、そういったことを一生懸命やってきたんです。ですからロボットを災害地に持っていって適用するとか、そういったこともいくつかやって、ある程度の実績は挙げてきました。ちょっと画面を切り替えていただきたいんですが。
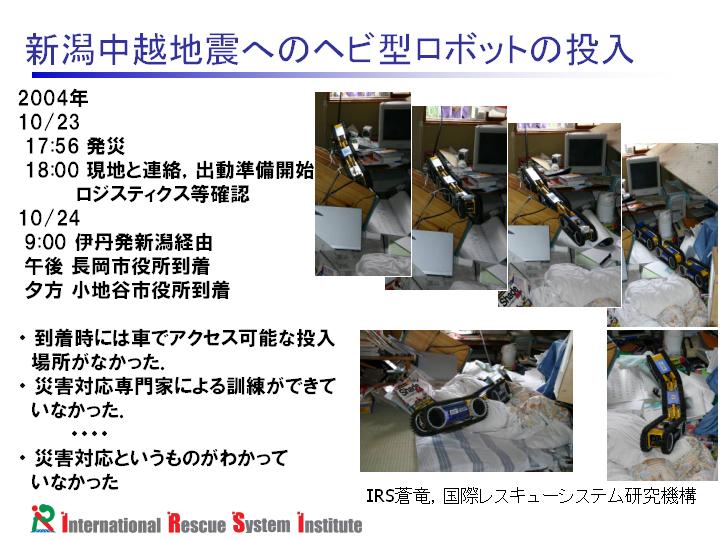
高橋:先ほどのヘビ型ロボットですね。
田所:そうですね。これが実はわれわれのNPOとして一番最初にロボットを災害地に適用した、いや、しようとしたものなんです。これは2004年に起きた新潟中越地震です。その時に現地と連絡が取れて、次の日には現場に入ることができたんですけれども。持っていったのがここにある、このIRS蒼竜(そうりゅう)というヘビ型のロボットです。そこにいらっしゃった責任者の隊長さんに、こういうロボットを作ったんで、ぜひ使ってくださいと言ったんです。そしたらその隊長さんは分かったと。このロボットを明日、山間部の現場に持っていくと。ヘリを使って持っていくんだと言われたんです。その次の言葉として、「ところでちょっと質問があるんだけども。このロボットを乗せるとすると、うちの隊員を1人下ろさないといけないけども、うちの隊員とこのロボットとどっちが役に立つんだ?」と言われたんです。それを聞いて、「あー、そうか」と。なんていうのか、つまりそれは私たちが研究開発をして、使えそうなロボットを作るということと、現場にほんとに使えることとのギャップというのはものすごく大きなものなんだなというのが、ほんとに身にしみて分かったんです。頭の中ではその前から分かっているつもりだったんだけども、でも実際に災害現場に行ってみて、それでほんとに命をかけてそれに対応している方とお話しをして、対応するということはどういうことなのかということです。つまりわれわれ作っているのは、消防の方とか自衛隊の方とかが使う道具を作っているわけで、その人たちがちゃんと使える形を取っていかないと意味がないと。そうすると、当然ですけど配備がなされてないといけないし、訓練もなされてないといけないし、それで初めてその役に立てるんだということです。ですから、そうなるようにということで、これ以降ちょっと心を入れ替えて
高橋:そうなんですか(笑)。
田所:ええ。いろんなことをやったんですけども。うこうしているうちに、少しずつ役にも立てるようになってきたというのが現状なんです。ちょっと次のものに切り替えていただきたいんですが。

これはアメリカなんですけれども、駐車場の建設現場が倒壊したという事故です。コンクリートを流してる間に全体が崩落したということで、あきらかにミスだと思うんですけども。
高橋:なんか途上国で起こりそうな事故ですね。
田所:そうですね。アメリカとはちょっと思えないような事故なんですけど。救助には全く間に合わなかったんですけども、事故の原因調査が行われることになって。それで現地の救助隊員の方で、われわれが開発した能動スコープカメラというものを使った経験のある方がいらっしゃって。
高橋:アメリカの方で使った方がいらっしゃったんですね。
田所:そうです。その方がこの現場はぜひ能動スコープカメラがあればいろんなことが分かるはずだということで
高橋:連絡が入ったんですね。
田所:連絡くれたんです。じゃあそれを手伝おうということで行きまして。それで正月返上で約2日間、1日半ぐらいのオペレーションだったんですけども、結果としてほかのロボットでは全然取れないデータを取ることができました。瓦礫の中の7メートルぐらい奥の映像でありますとか、あるいは梁(はり)とか柱とかがあって、亀裂がどんなふうに入ってるかとかですね。そうすると、建物の構造に対して応力がどういうふうに掛かって、それでどんなふうに崩れていったかというのが、専門家の人が見るとかなりよく分かるんです。ということで、お役に立つことができたんです。ちょっとそのときの映像がありますので見ていただきたいんです。
高橋:今回とは逆にアメリカのほうから日本に助けてくれというSOSが来たんですね。
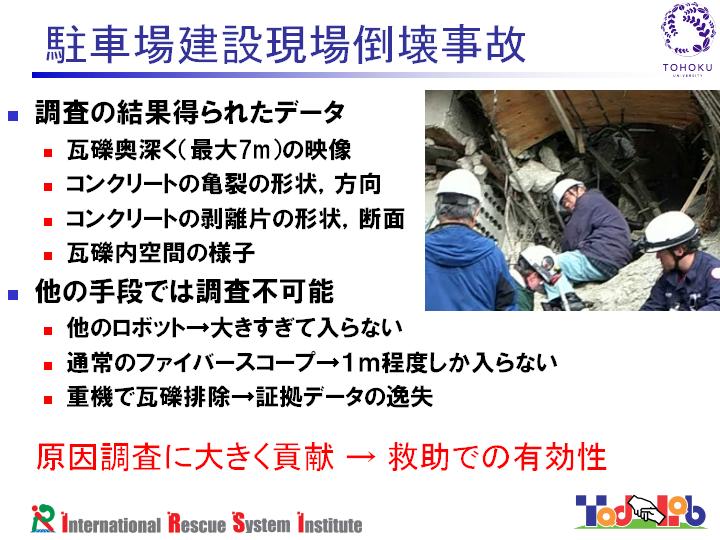
田所:そうですね。これです。この瓦礫の山、これがその建設現場の事故現場なんです。こちらの左の上の人が操作をしていまして、この白いケーブルみたいなこれが能動スコープカメラというロボットです。これはファイバースコープなんですけども、この表面自体に動力を持っていて、瓦礫の中にずるずるずるずると入っていくことができるという、そういうふうなロボットなんです。
高橋:あー、ケーブル自体が動ける。
田所:そうなんです。ですから3センチぐらいの隙間があると、このような形でずっと入っていきまして、中の映像をこうやって撮ることができるんです。これだと何がなんだかお分かりにならないと思いますけども。
高橋:ええ、分かりませんね。
田所:専門家の人が見ると、ここが梁(はり)だとか、ここが床だとか、ここは3階だ2階だとか言いながら、ずっと見ていくことができるんです。
高橋:ちょうどお医者さんが内視鏡でわれわれの中を見るのと同じような感じですね。
田所:そうなんです。
高橋:お医者さんが見れば分かるんですよね。
田所:そうですね。そのファイバースコープですと、1メートルぐらい入れるともう詰まってしまって駄目なもんですから、事故原因を調査するということには結局はあまり使い物ならなかったんです。
高橋:ケーブルが、動けるケーブルっていうところじゃないと、こういうところまで入っていけないわけですね。

田所:ええ、そうです。ですから、こういったような形でわれわれ開発をしてきました。これは大都市大震災軽減化特別プロジェクトの最後のあたりなんですけれども、倒壊家屋実験施設というものを神戸に作っていまして、実際に倒壊した家屋のような場所で実験を繰り返してきたんです。
高橋:これ動いているんですね。
田所:そうですね。
高橋:なんとなくちょっと気味が悪い感じもしますけど(笑)。
田所:今このケーブルが動いている。まさにヘビみたいで。よくヘビをまねして作ったんですかと言われるんですけど、けっしてそういうわけじゃないです。狭いとこに入れる機構はなんなのかということをずっと考えていって、いろんなものを試した結果としてできたものはこれで。
高橋:でもどうやって動いてるんですか、これ。
田所:これは表面に毛が生えてまして、その毛を振動させることによって、毛がその床を蹴って、それで動いていくんです。
高橋:あー、そうなんですか。
田所:そういう原理ですから、駆動力は大して大きくないんですけれども、例えばケーブルをねじりますと、全体の方向、動く方向をこうやって変えるようなコントロールすることもできますし。
高橋:このねじることは、こっちの外にいる人間が指示するんですね。
田所:そうです。人間がやるんです。これもやっぱり人間の道具ですから、ロボットというか道具に近いんじゃないかなと思うんですけれど。あるいはうまく操縦しますと、このぐらいの10センチ20センチぐらいのこういう段差を超えるということも可能ですけれども、だけれどもせいぜいこのぐらいなんです。そんなに高いところまで登れるとかそういったことはないんです。瓦礫もこのくらいの、左側にあるようなこんな石ころぐらいでしたら問題なく動き回ることができます。ですからこういったのを操縦しながら使っていくということなんです。ですけど、これはやっぱり操縦するものが人間なので、遠隔操縦ではないんです。つまり、例えばガス漏れとかがあるところに行って使えるかというと実はなかなかそうはいかない。人間が危険になりますから。
高橋:なるほど。そうですね。それで次のプロジェクトとして遠隔操作できるものを作ろうということでQuinceの開発プロジェクトが始まったということですね。
田所:そうです。
高橋:メンバーはどうだったんですか。最初の文科省のプロジェクトは100人ぐらいの研究者っておっしゃいましたけども、NEDOのほうのプロジェクトは?
田所:NEDOのプロジェクトは十数人です。
高橋:あら! そんなに小さくなっちゃったんですか。それはまたどうして?
田所:それはなんといいますか、実用的なものを作るというのがこのNEDOのプロジェクトの大きな目的でした。現場配備までするということなんです。そうすると、もうミッションがかなり決まっていて。それで試行錯誤するというよりは、これをやって、これをこなして、この技術はここのレベルまで高めて、それをこう組み合わせればできるじゃないかという、そういうふうな開発だったんです。ですからその技術を持った先生方、あるいは技術者の方に集まっていただいて、それで一つのシステムを仕上げるということをやったわけです。
高橋:そうすると今回福島第一原発の処理対応ロボットをっていうお話しが来たときは、その十数人の先生方で集まって、さっと対応されたということなんでしょうか。
田所:そうです。その時にヘッドになられたのが、千葉工大の小柳先生です。まず、この原子炉の問題というのはどちらかというと、遠隔操縦のインテリジェンスとか、あるいはどう三次元の地図を作っていくかとか、そういう技術よりも基本性能が重要なんです。つまりメカとしてぴか一の性能を持っていて、それで原子炉建屋の地下とか2階とかそういったところも苦にせず動き回ることができるということ。それに加えて水位計を設置するとか、水を取るとかそういった作業をできる機能も作り込まないといけない。
高橋:そうですよね。それ新たなミッションですよね。今までなかったことです。
田所:ですからそれは研究ということでいうと、大学でやるような種類の研究かというと、そうではなくて、どちらかというと、企業がお仕事としてがっちりとやるって、そういうタイプの研究なんです。小柳先生は移動ロボット研究所というベンチャー企業を持っておられて。ですからそこを中心として、われわれ東北大学とか、あるいは国際レスキューシステム研究機構がそれをサポートするような形で、協力して作り上げたというのが今回の原子炉対応ロボットです。
高橋:東京電力から注文が来たということですか。
田所:注文…、いや、こういう仕事をやってくださいという注文は頂きました。それ頂いたのは5月の8日ごろです。よく報道でもっと前から、4月の6日ぐらいから報道がなされていたと思うんですけども、東京電力ではわれわれのロボットがどのぐらいの性能かということを一生懸命テストしてこられまして。若干の技術的なトラブルもあったので、それも解決し、ということで。東京電力の福島の現場から上がってきたニーズというのがその水位計を設置する、それから水を採取するということ。これはもうQuinceじゃないとできないと。従ってやってほしいという、そういうことでリクエストが来たということです。ですから、それから2週間3週間、それまでもそうなんですが、徹夜に次ぐ徹夜で地獄のような日々を送って、食べるものも食べずに一生懸命がんばってきたというそういう状況でした。
高橋:どのところが一番難しかったんですか。
田所:一番難しいというのはやはり信頼性を上げる部分です。つまり確実にこれをやることができるというふうに思えるところまで仕上げるというところです。つまりロボットの上に重たいアームとかそういうものを乗っけますと不安定になってしまいます。
高橋:そうですよね。
田所:かつ、その水位計を設置して帰ってくるということは、ケーブルを繰り出しながら後ずさりして、それでケーブルをひっぱり過ぎるとせっかくそこまで届いたケーブルは水位計が上がっちゃうもんですから、そういうことも注意しながらやらないといけないということで、実は操縦がすごく難しくなってしまうんです。それじゃ操縦がどうしてもできないということで、操縦が優しくできるように工夫をしようというようなことをいろんな形でやりまして、そのあたりが非常に苦労したところです。
高橋:なるほど。やっぱあのゲームのコントローラーですか。
田所:そうです。ゲームのコントローラーです。それにカメラで撮った画面とか、そういったものがディスプレイの上にきちっと出て。
高橋:それを見ながらこうやってやるんですね。
田所:そうですね。あるいはバッテリーの残量であるとか、あるいはボディーがどれだけ傾いてるかとか、あるいは線量計の数値が見えるとか、そういったことも全部作り込んできたということです。
高橋:それがぜひ活躍して、福島第一原発が少しでも早く終息するように役に立つといいですね。
田所:ええ、それを願っています。いち早く福島の人たちの苦しみを解きたいという、その一念です。
高橋:ほんとにそうですね。じゃあ、ここでいったんCMを入れます。
(CM)
高橋:「科学朝日」本日は東北大学大学院教授田所諭さんをお迎えしています。今まで原発の事故対応ロボットのお話しを詳しく伺ってきましたけれども、今回は大震災の対応のために水中ロボットも活躍されたと聞きました。
田所:そうですね。われわれスタートポイントは阪神淡路大震災で、津波ということは実はほとんど何もやってこなかったんです。想定外というか、想定はしていたんですけれども、まず津波で何ができるかというのがわれわれよく分からなかったというのがありまして。ですから倒壊建物に非常に集中してきたんです。でも今回は港湾の被害が非常に大きいということで、それの被害調査とか、あるいはご遺体の捜索とかに協力してほしいというご依頼もありまして。水中ロボットをアメリカの友達といいますか、共同研究者の人と協力をして、投入するということをやらせていただきました。
高橋:これがそのロボットですね。
田所:そうです。このSeaBotix(シー・ボティックス)という会社が作っているサーボットというロボットなんですけども。
高橋:もう商品になっているんですね。
田所:そうです。これ商品になっています。
高橋:アメリカのはね。
田所:ええ、そうです。あるいはこれは南フロリダ大学が作ったシーモアというそういうロボットです。これほとんど実用ロボットで、非常に長い間いろんなことに使われてきた実績があります。日本もこの種のロボットは作られてはいるんですけど
高橋:ありますよね。JAMSTEC(海洋研究開発機構)が作っているロボットとかありますよね。
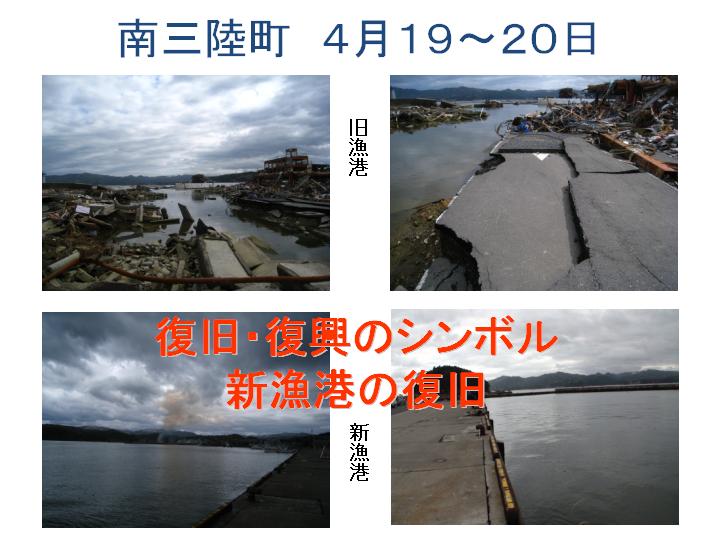
田所:そうですね。ありますけれども、それがたくさん売られるような形にはあまりなっていなくて。消防にもこの種のロボットが10台ぐらいは配備されていますし、自衛隊でも実際に使われているんです。ただ、このロボットの面白いところというのは、最先端のソナーが付いてまして、非常にクリアに海底の様子を見ることができます。ですから例えばご遺体の捜索でありますとか、海の底に沈んでるものの調査でありますとか、そういったことには非常に優れた性能を発揮できたということです。高橋:今回もそういう成果があったんですか。田所:そうですね。一つは南三陸町に行きまして、町長さんに伺ったところ、まず港湾の被害を調べてほしいと。といいますのは、9月になるとシャケが上がってくると。それまでに市場を復活させたいと。そうじゃないとみんな食べていけなくなっちゃうということで、それは今非常に重要であると。それをやるために、新港という、新しい港のところを開くんですけども、そのためには下が船が通れるかどうかということをきちっと調べないといけない。だからそれを堤防沿いとか、あるいはもっと深いところも全部調べて、船が通れるというところを調べてほしいと言われまして。
高橋:なるほど。
田所:これをやったわけです。
高橋:通れたんですか。
田所:そうですね。こういう漁港の中ですけどね。それで、やったところほとんど瓦礫はなくて。
高橋:あー、よかったですね。
田所:瓦礫はどうももっと沖合に流されていたみたいで。ですから一部を除いては大丈夫だということが分かりまして、それで町長さんに非常にほっとしていただいたということです。それから陸前高田市はご遺体の捜索を海上保安庁の方々の協力でやったんですけれども、結局はご遺体を発見することはできませんでした。
高橋:災害対応ロボットをずっと研究されてきて、今回の東日本大震災、いろいろがんばっておられますけれども、できることできないことがいろいろ見えてきたんじゃないかと思いますけれども。
田所:そうですね。
高橋:今後の課題みたいなものはどのように捉えていらっしゃいますか。
田所:やはり阪神淡路をきっかけとして、2002年ごろにこの分野はスタートしたと考えていいと思うんですけれども、その結果としてある程度のことはできるようになってきたと。でもまだまだやらないといけないことはたくさんあるんです。特に津波、類似した災害としては洪水でありますとか、風水害だと同じようなことが起きますけれども、そういったところでできる技術というのを作っていかないといけません。例えば今ヘドロをかいて、そいでそれを排除するとかも非常に大変ですね。
高橋:あー、そうですね。
田所:あるいは、取り残されたご遺体の捜索にしても、自衛隊の方とかものすごい人数で入られて、それでものすごい長い期間をかけて捜しておられる。こういった作業をロボットを使うことによって、軽減化するということは非常に重要だと思うんです。それをやるためには、それと同時に基礎研究もきちっとやってく必要があって、そういった環境できちっと動ける、あるいはセンシングができる、人間の操縦を助けることができるといったそういった機能を、それをきちっと作っていくということが必要だと思います。
高橋:そういう研究ができる場所もまた必要ですね。アメリカのデザートシティですか、
すごい設備があるようですけれども。
田所:そうですね。ですからやはりこういったことを日本として進めていくことは重要だと思うんです。私思うのはアメリカが非常に先端技術で優れた成果を挙げている一つの理由は軍事だと思うんです。軍事にドライブされて、それでいろんなことが進んできている。日本はどうかというと、軍事研究っていうのは少なくとも大学ではゼロですし、日本の国を挙げてほとんど何もやっていないという状況だと思うんです。
高橋:そうですね。
田所:それでいいのかというと、その状態だと、先端技術が生まれても実はそれを実際に使う中でもんでいって、向上させていく、実用化してくというループが回らないという、そういうことがあると思うんです。われわれは軍事やる必要はないと思うんですけども、平和国家日本であったら、災害救助みたいなものをまず先頭に立てて、そこで先端技術をずっともんでいくと。それによって、それがどんどんと民生品にも流れるし、あるいは宇宙とかいろんな先端的なものにどんどんと使われていくという、そういった流れを作る必要があるんじゃないかと思うんです。
高橋:ほんとにそうですね。やっぱり軍事が必要だっていう方向にいくのは絶対避けたいと思いますので、災害対応にこそ日本の力を注ぐべきところがあるということで、いろんな人のコンセンサスを得られるといいですね。
田所:そうですね。平和国家というのは戦争を起こさないのが平和国家ではなくて、人の命を助ける、人が死ななくてもよくするというのが平和国家だと思うんです。
高橋:ほんとにおっしゃるとおりですね。
今日は、東北大学田所諭先生に詳しく災害対応ロボットのお話しを伺いました。「科学朝日」本日はこの辺で失礼いたします。
有料会員の方はログインページに進み、朝日新聞デジタルのIDとパスワードでログインしてください
一部の記事は有料会員以外の方もログインせずに全文を閲覧できます。
ご利用方法はアーカイブトップでご確認ください
朝日新聞デジタルの言論サイトRe:Ron(リロン)もご覧ください