- 文字サイズ
- 小
- 中
- 大
朝日ニュースター
2011年09月25日
==============================================
朝日グループのジャーナリズムTV「朝日ニュースター」は、通信衛星などを利用して24時間放送しているテレビチャンネルで、ケーブルテレビ局やスカパー!などを通じて有料視聴することができます。4月から始まった新番組「科学朝日」は、高橋真理子・朝日新聞編集委員がレギュラー出演する科学トーク番組です。WEBRONZAでは、番組内容をスペシャル記事としてテキスト化してお届けします。
====================================================================
ゲスト 東京大学大学院情報理工学系教授 石川正俊さん
高橋:こんばんは。科学の最先端にひたる「科学朝日」、案内役の高橋真理子です。本日のテーマは、「高速知能システムの世界~ロボットは人間を超えられるか?」です。ロボットは人間を超えられるかという問いかけは、はるか昔から繰り返し投げかけられてきました。鉄腕アトムやドラえもんに馴染んでいるわたしたち日本人はロボットは人間より優れていて当たり前だと思いがちですが、ASIMOなど実際のロボットを見てみると人間と同じようにスムーズな動きをするというのはなかなか難しいことだと思い知らされます。しかし、今日これからご紹介するシステムは、人間をはるかに超える能力を持ったシステムです。本日のゲストは、この驚くべきシステムを開発された東京大学大学院情報理工学系教授の石川正俊さんです。石川さん、よろしくお願い致します。
石川:よろしくお願い致します。
高橋:早速ですけれども、高速知能システムと聞いてもですね、普通は全くイメージが浮かんでこないんですけれども、これはどういうものなんでしょうか?
石川:知能システムというといろんなイメージが浮かぶと思うんですけれども、ロボットの関連で知能システムという場合には、環境あるいは外界を認識し理解し、それに対して適応的な知能を持った行動を起すという、そのシステム全体を指します。技術でいいますと、センシングという技術と認識という技術、それから制御あるいは行動という技術になります。認識し行動するシステム。
高橋:昔は人工知能という言葉がよく使われましたよね。
石川:はい、ええ。
高橋:あれはコンピューターだけのものを指していたんですかね?
石川:昔の狭い意味での人工知能は、1階述語論理という論理を主体としてコンピューターの中に論理を上手く処理するシステムを作ろうという話だったんですね。それはコンピューターの中に閉じていた世界なんですけれども、最近知能システムって広く考えた場合に外界を理解するところ、それから外界に対して働きかけるところが知能という存在のポイントではないかということで、外界を理解することとそれに対して行動を起こすということが1番知能というものの根幹を成すんだという考え方が出てきまして。当然それに脳に相当する論理も必要なんですが、全体を指して知能という言葉を使うようになってきたということですね。
高橋:昔考えていた人工知能というのは、非常に狭いものを考えていたと?
石川:頭の中だけということですね。
高橋:実際の知能って、本当は外にある体とかそういうところの動きがあって初めて存在するものであると。
石川:そうです。
高橋:そういうふうに変わってきたということなんですね。その中でも先生が今取り組んでおられるのは、どういうものなんでしょうかしら?
石川:知能というものが認識して行動するシステムといっても、人間という優れた知能がそこにあるので、人間という優れた知能をどうにかして作ろうという考え方が知能システムの一つにあります。それですと人間というシステムを超えようという考え方がないんですが、われわれの研究は機械というものが機械としての知能はどこまで実現できるのか、機械の限界はどこにあるのかと突き詰めていきます。そうすると、知能システムとしての人間の性能のはるか上を行く機械システムができるんだということで、それを目指した研究をやっています。
高橋:人間を真似するんではなくて、人間のことは脇に置いておいて、機械ができることをとことんまで突き詰めてみようと。
石川:ええ。脇に置いといてという言葉はちょっと微妙なんですけれども。
高橋:違うんですか?
石川:いや、いや。合っているといえば合っているんですが、人間はヒントにはするんです。人間のやっていることは認識して行動するという意味では優れたことをやっていますのでヒントにはするんですが、性能としてはそれ程でもないので。
高橋:人間のほうはですね?
石川:ええ。ですから人間のやっていることはヒントにはなるんだけれど、性能は上を行こうということになります。それは脇に置いてなのか目指してというのか、それは言葉はいろいろなんですけれども、われわれは機械システムとしての限界を追求しようと。
高橋:はい。それでは具体的にどんなふうに人間を超えたものができているのか、これからじっくりお伺いしたいと思います。ここで一旦コマーシャルです。
~CM~
高橋:「科学朝日」本日のゲストはこの方、東京大学大学院情報理工学系研究科教授の石川正俊さんです。改めまして、よろしくお願い致します。
石川:よろしくお願い致します。

高橋:本日のテーマは、「高速知能システムの世界~ロボットは人間を超えられるか?」です。早速、先生が開発されたロボットを見ていきたいと思います。動画公開時にとても多くの反響が来たというバッティングロボットから御覧下さい。ジャストミートですね。
石川:ええ。この場合カメラが2台そこにあるんですが、これでボールの3次元の位置を1,000分の1秒ごとに捉えています。1,000分の1秒ごとのボールの位置が分かるので、それに対してバットを振っているということです。バットを振る際に人間なんかはよく予測とか経験を基に打つとかっていうのをやるんですが、この場合は予測を全く入れていませんので、時々刻々のボールの位置に対してバットを合わせていくということになります。
高橋:どんなボールを投げてもジャストミートするわけですね?そうすると。
石川:そうですね。公開時には10割打てると言ったんですが、10割打ててもヒットではないと言われたので、これ実は今どの場所にでも打てるようになっています。
高橋:え?
石川:ですからホームランを打てと言われればホームランを打ちますし、三遊間を抜けと言われれば抜けるようになっています。
高橋:そうなんですか?
石川:ええ。丸いバットではできないんですけど、平らなバットですとそれができる状態になっています。
高橋:へー!
石川:1,000分の1秒ごとにボールの位置が分かりますので、それに合わせてバットを振ればそういうことはできるということなんですね。
高橋:それは単純な物理の法則で?
石川:物理と制御ですね。制御をきちんとやれば、それができるということです。
高橋:へー!
石川:人間はそれができないんです。人間の目は1,000分の1秒が見えません。通常のビデオレートというのは30分の1秒、1秒間に30枚の絵しか見えない。それでも連続した映像として人間には見えるので、人間の目はその意味では性能が低いということです。30分の1秒で考えますとこういうことはできないんですが、1,000分の1秒で考えますとボールが1,000分の1秒ごとのデータが来ますので、それに合わせてバットを振れば良いということになります。
高橋:これ投げるほうもロボットなんですよね?
石川:投げる方もロボットです。実は専門的にいいますと投げる方が難しいんですが、一般の方が驚かれるのは打つ方ですね。
高橋:投げる方はどういう制御をしているんですか?そのカーブとかストレートとか、何かそういうのはできるんですか?
石川:それはまだできていないんですけれども、指で投げるというのはこの腕の動きと指の動きを合わせなきゃいけないので、ここが非常に難しいんです。腕の動きが先に行って指が後から行きますと、ボールがどこへ飛ぶか分からない。どこへ投げるか分からなくなるので、これをきちんと合わせる必要があります。ところが腕の動きが速くて、腕の動きも大きいんですが、指の動きは小さいもんですから、これを合わせるのがなかなか難しいんですね。
高橋:へー!
石川:そこも制御としては難しいところになります。これは実は動画を発表した時には日本よりもアメリカのほうが非常に受けまして、アメリカではどうもイチローと、それから松坂ということがあって。
高橋:そうなんですか。学会で発表されたんですか?
石川:そうじゃなくて新聞等で発表したのが、アメリカで配信されて、それ以降なんですね。ボールは1,000分の1秒で見ますとゆっくり見えますので、実はこれ0.2秒時間をいただく必要があるんですが、0.2秒以内であればどんなボールでも打てるということです。0.2秒はバットを振り出してから打つところまでが0.2秒掛かるので、これ以上早くはできないんですが、0.2秒いただければバットはそこへもっていけますので、どんなボールが来ても必ず当たるということになります。
高橋:へー!やっぱりすごいですね、そういうことが実現できるというのは。これのキーとなるテクノロジーというものは、何なんですか?
石川:キーとなるテクノロジーは、二つあります。一つは高速のビジョンということなんですが、これは後で詳しく説明致します。実は高速のビジョンだけでもできませんで、もう一つちょっとした工夫が必要になります。
高橋:はい。
石川:それが人間の認識系のやり方を直列的にやるか並列的にやるかという問題です。これちょっと分かりにくいと思いますので、直列的とは何かといいますと、人間が目から情報を得て何かボールが飛んでいる処理をして、ならばどうすれば良いという考え方をしてバットを打ち出すということですと、実は工学的にいいますとセンサーからコンピューターを通ってモーターに出すというパスになる、これ直列的なんです。これですと間に合わないんです。考えている間にボールが通り過ぎちゃいますので間に合わない。このやり方で動かすとバッテイングロボットは動かないんです。これとは違う並列的といいまして、バットを動かしながらボールを認識しながら、それから細かいことも全部並列に動かす。
高橋:同時にやってしまうという。
石川:そうです。そうするとバットを振っている間にいろんなことが同時並行に進んで、最終的にボールに必ず届くということになります。これ時間的には縮まりますので、こういう高速の動作を実現しやすい方法ということになります。
高橋:動かし始めちゃって途中で調整するという、そういうことですか?
石川:そういうことです、はい。ボールの位置をちゃんと理解して予測してそれから動かすのではもうボールは通り過ぎちゃいますので、もうある程度動かし始めてそこから一生懸命調節しながら合わせていくというやり方ですね。
高橋:人間は、そうはやっていないわけですかね?
石川:これにはいろんな説がありまして、直列的な思考をしている場合と、並列的な思考をしている場合とあります。人間も無意識のうちに手を動かせるというのは、並列に動かしていることになります。意識をもってペンを取りたいという時は、ペンを見てペンを取りたいといえば直列的に頭がある。
高橋:両方やっているんですね、人間は。
石川:両方やっている。階層的並列分散構造というのが人間の脳のほうですし、われわれのロボットもそうなんですが、それを直列的なパスが優位になっているか、並列的なパスが優位になっているかによって、対処するタスクのやり方が変わってくるという。
高橋:じゃ、バッテイングロボットは、この並列的な仕方でないと実現できない?
石川:並列的にやらないと高速性が実現できない。
高橋:なるほど。では、もう一つのキーテクノロジーは?
石川:こちらの方が重要なテクノロジーになります。高速の画像処理、高速で撮像することは視聴者の皆さんもスローモーションというのでよく知っていると思うんですが、スローモーションは一度撮ってからゆっくり後で見せるというやり方。この場合はそうではなくて、撮った瞬間で結果を出さなきゃいけない。そのためには処理というものを同時にやる必要があります。高速の画像処理という技術がわれわれの研究室の最も中心となる技術でして、先ほどもちょっと申し上げましたけども、人間の目はだいたい30分の1秒ぐらいしか見えない。テレビの操作が30分の1秒、映画は24枚、1秒が24枚なんですけどその辺までしか見えないんですね。
高橋:ええ。
石川:でも今のイメージセンサーの技術というのは1秒間に1,000枚ぐらい見えますので、1秒間に1,000枚見えるものを、1,000分の1秒間に1,000枚処理する処理系を作ってやればいいと。この処理系をちゃんと上手く作ったのがわれわれの研究室で。
高橋:そうなんですか。
石川:それをやることによって1,000分の1秒ごとに映像が撮れて処理して、その絵が何であるかまで理解できるシステムがここにあるんです。これがないと1,000分の1秒のボールのデータは実現し得ないということになります。
高橋:その目に当たる部分、機械で1,000分の1秒ごとに撮るということは、前から、前からというか、そんな前ではないですけど、あったわけですね?
石川:ええ。
高橋:でも撮れてもデータが多すぎちゃってコンピューターのほうが処理できない、だから宝の持ち腐れみたいな状態だったわけですね?
石川:ええ、はい。
高橋:それを全てのデータをきちんと即座に処理できるようにした。そこは何ですか、プログラムとかそういうのの開発になるんですかね?
石川:並列の処理回路ということなんで、回路の技術になります。
高橋:回路の?
石川:はい。15年前ぐらいからやっているんですけども、15年前にはこんな大きな回路だったんで、それが半導体の技術がどんどん進みましたので、今は手の平の上に乗るようなちっちゃな回路でも1,000分の1秒の処理ができるようになりました。それはわれわれの研究室ですとできるということなんですけれども。
高橋:そうすると、その高速ビジョンチップを使った応用例というのも沢山あるんですね?
石川:ええ。
高橋:これを使うと、コンピューターで画像を扱うときに非常にスムーズにいろんなことができるわけですよね?
石川:はい。
高橋:では例として、3次元のリアルタイム計測というのをご紹介いただきましょうか。
石川:これがそうなんですが、この場合は補助光源としていろんな光源を出していますが。その光源はドットなんですが、ドットの当たっている位置を三角測量というやり方で、3次元の情報に変えることができます。それを1,000分の1秒、正確にいいますと955分の1秒なんですけれども、1,000分の1秒で処理しています。ですから実はこの絵リアルタイムの絵が映っているんですけれども、これ以上に速いんです。1,000分の1秒ごとに3次元の絵が撮れているということになります。
高橋:これ、こっちの動きが同時に向こうに出ているというところがみそなんですよね?
石川:同時に3次元の情報として出ているという。
高橋:3次元の情報として。
石川:従来はこんなことはとてもできませんので、3次元の情報は非常に遅いということだったんですが、今やもう人間の目よりずっと速いスピードで3次元の情報が取れるということ。
高橋:人間が見ているよりも先に機械の中でこの3次元の画像が出来ちゃっている。
石川:できちゃっているということです。ですからこの情報さえ貰えば、機械がそれに応じて動くということが可能なわけです。ということは、人間の目では見えないものでも機械は動けるという。ですから、普通のヒューマノイロボットっていうのは人間の目で見て動きが見えるのが普通なんですが、それではわれわれの研究室からしますと遅いんです。1,000分の1秒というのは人間の目には見えないスピードですので、ロボットの動きは人間の目には見えないスピードで動く筈なんです。バッテイングロボットはまだ見える範囲なんですが、われわれの研究室で高速なものになりますと、人間の目には見えないスピードでいろんな技ができるというものになっています。
高橋:そうなんですか?
石川:はい。
高橋:すごく不思議な世界ですね。人間の目に見えない速い動きで何かできちゃうわけですね、ロボットが。
石川:例えばですね、生卵を上から落とすんですが、落とした生卵を下で2本の指でキャッチすることができます、割らずに。
高橋:割らずに。
石川:ええ。これは卵が落ちるスピードは1,000分の1秒の目で見ますとゆっくりですから、そのゆっくりなものに対して高速のハンドで追いかけていって掴めば掴めるということになります。人間には絶対にできないスピードですので。
高橋:そうなんですか。でも人間の手は軟らかいから割らずに受け止めることはできますね。ただ、ロボットの手は硬いから、それで普通にやったら、絶対に割れちゃうわけですね?
石川:はい、そうですね。
高橋:それを優しく掴むことができる。
石川:ええ。
高橋:この映像を一般の人が見ると、別に何かちょっと当たり前みたいに感じちゃうかもしれないですね。このすごさが分かるのは、やっぱり研究をされてきた方たちですよね?
石川:そうですね。今までの画像処理で30分の1秒の画像処理っていうのはあったわけですから、30分の1秒の画像処理では上手くいかなかったという経験をお持ちの方はだいたい感激していただけるんです。30分の1秒でやったらば画像処理が遅いから動かなかったというアプリケーションは幾らでもあるんですが、そういうことを一度でも経験なさった方は、われわれの1,000分の1秒に関してはものすごく感激していただけます。
高橋:じゃ、この速いのがあったらやりたかったというようなものは、沢山世の中にあるんですね?
石川:沢山ありますね、はい。1,000分の1秒より速いものに関しては、今度は物理現象としてそれ以上に速いものって小さなものになってくるんですね。家庭にあるスピーカーも低音は大きいんですが、高音は小さくなりますね。
高橋:はい、はい。
石川:どんどんどんどん小さなものは高速に動くので小さなものになってくるので、1,000分の1秒以上になりますともうちっちゃなものしか動かないんですね。ですので1,000分の1秒あると、だいたい人間の周りにあるものの大きさのものは十分だということになります。30分の1秒では不十分なんですけれども1,000分の1秒だと十分だということになって、大部分のものは1,000分の1秒の画像処理をやれば思うがままに制御できるという。
高橋:へー。わたしそれで先生の研究室のホームページにある画像を幾つか見てすごく感激したのは、顕微鏡ですよ。
石川:あー、はい、ええ。
高橋:顕微鏡で見たゾウリムシの映像があるんですけども、普通は顕微鏡で覗くとゾウリムシって動いているから視野から直ぐいなくなっちゃうんですよね。
石川:はい、そうです、そうです。
高橋:先生の研究室のところにある画像を見るとですね、ずっとその1匹を追いかけていっているんですよね。
石川:はい、そうですね。
高橋:あれすごいですよね。
石川:ええ。それは高橋さんが一度でも顕微鏡で苦労なさったから、そういう苦労をなさった方はだいたい感激していただけます。あれは連続観察というテクノロジーになるんですけれども、視野からふっといなくなっちゃうものを下にモーターを置きまして、このモーターでその視野を動かしていって、ゾウリムシが動くことに、トラッキングという技術なんですが、動く方に視野を追いかけていっているんですね。ですからゾウリムシ自体は気持ちよく泳いでいるんですが、顕微鏡の映像自体は視野の真中にゾウリムシが泳いでいる形になります。
高橋:顕微鏡の台を、下で動かしているわけですね?
石川:そうです。
高橋:動かすのも、1,000分の1のタイミングで動かしているんですか?
石川:そうです。映像を1,000分の1秒のカメラと画像処理で撮りまして、その結果としてどこへ動かせばゾウリムシを捉えられるかというのを計算して、フィードバックをかけているということになりますね。
高橋:仕組みはそういう説明をされると分かりますけど、実際にずっと視野の真ん中に生きているゾウリムシがいるというのはすごいですよね。
石川:普通は通り抜ける一つ二つの泳ぎしか見えないんですが、連続してずっと見えるので特に医学部関係の先生からは大変ありがたがられている。
高橋:そうでしょう。あれは市販とかされないんですか?
石川:市販はしています。
高橋:もうしているんですか?
石川:はい。
高橋:普通の顕微鏡より、どれくらいお高いんですか?
石川:だいぶ高い。
高橋:だいぶ高いですか、そうですか。
石川:制御とモーターのちょっと良いものが必要なので、だいぶ高くなります。ただ、あれはいろんなところに応用が可能です。一つには動いているもの、動きを捉えることができるので遺伝子が動きにどう関係しているか。今までは静止画しか撮れないので、動きということといろんなものを関係付けることができなかったんですが、今度は動きと何かが関係しているということが関係付けることができるようになるわけですね。不妊治療の場合に精子の鞭毛をどう見ていくかということもできるようになります。逆に今度は止まっている細胞が山ほどあった場合に、その細胞を1つずつ検査していくというのを高速にできることになります。1個見ては次を見るというのを、できる限り早く制御できることになります。
高橋:1,000分の1のスピードでできちゃう。
石川:そうするとわれわれのとこもやっているんですが、赤血球をダーッと流すんですね。人間の目に見えないスピードで流したときに、これを連続的にチェックができる。そうすると検査が高速化するわけですね。
高橋:なるほど。いろいろ役に立つ応用が沢山あるんですね。
石川:ええ、はい。
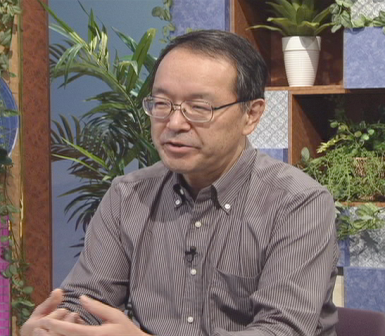
高橋:この他にも先生の研究室では本当に様々なものを開発されているのですが、先日わたしも研究室にお邪魔して幾つか見せていただきました。その時のVTRがありますでしょうか?これが、空間で指を動かして文字を入力するという。これ、あそこ、離れたところでちょっと指を動かしているんですね。
石川:そうです。下にカメラがあって、そのカメラがこの指を見ているものですね。キーボードに相当するところを、離れたところからやる。
高橋:結構難しかったんですよ、慣れるまで大変で。
石川:これちょっと慣れるのに時間かかります。キーボードっていうのは、どういうキーボードでも慣れるのには時間かかるんですが、これもやはりそれには時間がかかります。ただ、アメリカではファットフィンガープログラムといって、太った指でPDAの小さなキーボードは打てないという不満がつのっているんですが、ちょっと失礼な言い方ですが、太った指の方でもキーボードが打てる可能性があるということで、これも日本よりもアメリカで相当いろんな方から評価を受けたものです。
高橋:機械をどんどん小さくしていこうとすれば、いずれはやっぱり何かこういう仕組みが必要になるんでしょうね?
石川:これはこれで良いかというと、それはまだ研究の途中なんですが、かなり大きな第一歩を開いたというふうに思っていまして。今までこういうことができると思っている方は殆どいらっしゃらなかったんですが、指のスピードが速いもんですから、そのスピードについていけるカメラじゃないとこれはできない話ですね。それができるということを実証したのが、これです。この形のままかどうかに関しては多分違う形になるかもしれませんが、この技術の延長上にあるというふうにわれわれは思っています。
高橋:それからですね、芸術作品にも触れてきたんですよね。
石川:はい。メデイア・アートといわれるものですね。

高橋:これスクリーンですね。スクリーンを触ると、こういうふうにどんどん変わるんですよ、映像が。
石川:ええ。触ったところが、この場合は過去の映像になるんですね。
高橋:触ると過去に戻るんですよね?
石川:ええ。その触った場所だけが過去に戻るので、他と時間が違う1枚の絵ができるという、場所によって時間が違う1枚の絵ができる。それが上手い効果イフェクトをかけると、こういった動画のような芸術作品になる。インターラクテイブ・メデイア・アートという、見る人が手を出すことによって自分で自分なりの絵ができていく。
高橋:触ると夜になるんですよね。
石川:そうです。人間が通常見ている映像というのは全て時間は同一のものだったんですけど、これは違う時間になるんです。
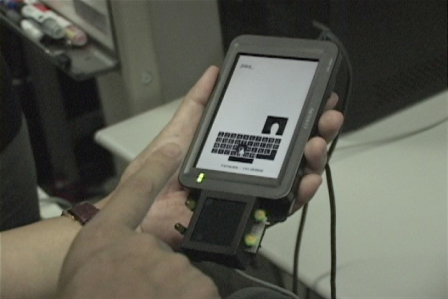
高橋:これがまたユニークな装置なんですよね。こういう下に箱があって、このプラスチックの板であるだけなんですが、ここにCTとかの映像が映るんですよね。
石川:そうですね。
高橋:あたかもここの空間の中にこの映像があるみたいに映るんですね。プラスチックを斜めにすれば斜め切りになるし。
石川:そうですね。普通は固定された画面にいろんな映像が映るというんですが、この場合はプラスチックのシートを自分で動かす。自分で動かした、その動かしたポジションでの切断面の映像が出てくることになる。

高橋:これはバナナが電話になるというもの。本当にこれバナナから声が聞こえているんですよ、不思議なことに。これちょっと種明かしして下さっているんですけども。
石川:バナナを高速のカメラでトラッキングしている。ちょっとまだ高速のカメラは使っていないんですが近々使う予定で、そうするともうちょっと性能が上がるんですが。カメラでバナナを捉えて、その捉えたバナナのところに超音波で音を集約している。
高橋:そうすると聞いているほうは、そのバナナから音が聞こえてくるということですね。
石川:そうですね。

高橋:何か不思議な世界ですね。でも頭の中を見るさっきの機械ですけれどもね、あれは最初はわたしも見えない空間のところに何かこう映像を結んでいて、そこにこうプラスチックのスクリーンを置けば好きなように見えるのかと思ったら、そういう仕組みじゃないんですね。
石川:違います、違います。もっと単純なんですが、ここには何の映像もないんです。こういうシートを置いたときに、そのシートの位置と方向を計測しているんです。これがセンシングの技術です。これが高速にセンシングできる。そのシートの位置と方向が分かれば、その時の映像を出しているんですね。ですから、その断面の映像しか出していないんです。皆さん全部の映像を出していると思われる方が多いんですけど、そんなことをやっていたらば間に合いませんので、シートの断面だけを出している。ですからあれ実は皆さんデイスプレーの技術だと思われている方も多いんですが、中を開くと実はあれは計測の技術です。あのシートをいかに高速に3次元計測できるかということになります。
高橋:下の箱から上のシートの位置を測っているわけですね?
石川:はい。それが高速にできて、そこの位置が分かればそれに合った映像を出すということは今の時代ですと簡単にできる。高速に3次元計測するのが難しいということなんです。
高橋:でも高速計測ができると分かっていてもですよ、ああいうシステムを作ったら面白いというのはなかなか思いつかないんじゃないんですか?
石川:そうですね。
高橋:よくああいうのを思いついたなと。
石川:うちの研究室全体がそうなんですけれども、高速の画像処理という基盤の技術があります。この技術は大切にしている技術。ですがこの技術を磨くことを大切にするだけではなくて、この技術をある時は医療、ある時は自動車、ある時はロボット、ある時はヒューマンインタフェースという形で、いろんなところへ応用するということを研究室全体でやっているということが、もう一つわれわれの研究室の特徴なんですね。ですから研究室のメンバーは皆何か違うことを、基盤の技術を使って何か違うことをやってみようと日頃から考えている。面白いことを何か考えようという意識は高いと思います。
高橋:今までないものを何か作りだそうということですね?
石川:ええ。高速の画像処理というのは世界中でもあんまりない技術なので、ない技術を使って新しいことを生み出そうということなんです。
高橋:先生のところはそうやって次から次に開発されているのに、真似してくるところはないんですか?
石川:真似してくるところはあるんですが、まだそれ程追いつかれてはいないという。
高橋:そうですか。へー。国内で真似してくるところはないんですか?
石川:国内でもあるんですけど、まだ。国内で数箇所ちゃんとできているところがあるんですが、これ全部わたしの研究室の出身者の方。
高橋:むしろ拡大しているという感じですね。それから面白いのがありましたのが、新しいブックスキャンの技術ですね。これもちょっと見てみましょう。
石川:はい。これ上にカメラがあって、レーザーでちょっとした縞模様を出しています。その縞模様をカメラで高速に撮りますとその縞模様の3次元の位置が分かりますので、本の変形が1,000分の1秒ごとに撮られます。1,000分の1秒で撮るとこのスピードはむしろ遅いぐらいのスピードでして、この変形を1,000分の1秒でこのスピードで撮れますので、本の変形が分かって映像が撮れますので、変形の程度を逆算すれば平らな絵が元に戻るということになります。これは通常はこうじゃなくて反対側にしてコピーのようにやるのが普通なんですが、それでやっていると遅いもんですからこういうことで。これもやはり1,000分の1秒で形状が撮れるということが分かっていないと思いつかない発想なんですが、世界ではあんまりそういうことを分かっている人が少くなかったもんで、われわれちょっとやってすぐできてしまった。
高橋:すぐできてしまったんですか。あれ簡単ですよね、パラパラパラパラとやればもう取り込めちゃうんですね、全部。
石川:そうです。今の実験では、1分間に300ページぐらい取り込めるようになっています。
高橋:でも逆に言うとパラパラパラパラと上手にやるのが難しいかもしれない、人間のほうが。
石川:人間がやろうとしますと、そうですね。高速のほうは機械でめくりましょうという方向に今なっています。もう人間じゃとても無理なので。お札を数える機械なんかがパラパラパラと高速にいくんですが、あのスピードでスキャンニングができるでしょう。
高橋:本のまんま、つまり今はバラバラにしてスキャンをしますよね。そうしないで本の形のまま機械でパラパラできるわけですか?
石川:そういうことです。いろんなバリエーションがあって、普通の本をパラパラパラというのもあるんですけど、大切な古文書の場合は裏返してこうやること自体が嫌われるということもあって、表にしてゆっくりめくっていくと。古い本の場合は和紙なので形状が複雑なので、その形状をきちんと撮れるかというのが元に戻せるかということになります。それから実は1番需要の大きいのは、会社の倉庫にある書類の山なんだそうで。各会社ともあまり使わないんだけど残しておきたい書類というのがあって、それの処理に困っている部分もあって。倉庫にあるのをパラパラパラと機械でやるんですけど、機械でやれば全部電子化されるということは、倉庫が要らなくなる可能性があるということです。
高橋:じゃ、これももう売られているんですか?
石川:これは今ある会社と共同研究をやって、実用化に向けて開発を進めているところです。
高橋:まだこれからなんですね?実際に商業化というのは。
石川:ただ、もう商業化を目指して研究をやっていますので、もうすぐだと思います。
高橋:お値段はどれくらいするんですか?
石川:実はいろいろな値段の幅がありまして、会社に1台置くのか、コンビニのようなところに置くのかというのによって、技術のレベルも上げたり下げたりしますし、精度とかも高い精度のものと低い精度のものとあると。それからもう一つ、これと並行して著作権問題をどういうふうに処理していくかということも同時に研究していまして。
高橋:そうですね。
石川:ええ。著作権保護も含めたスキャニングの方法というのを考えている最中なんです。
高橋:基本は自分のためにスキャンするのは良いんですよね?
石川:はい。
高橋:そういう機械を作って売るとなると引っ掛かってくるわけですかね?
石川:ええ。著作権のあるものに関しては、そうですね。
高橋:いろんな問題が出てくるわけですね?何かを商品として外に出そうとすると。
石川:はい。ただ、これも高速性ということになりますと、人間の目に見えないスピードで全部が動いているので、著作権保護もそのスピードでやれば人間には分からないところで著作権保護ができますので。
高橋:え?どういうことですか?ちょっとよく分からないです。
石川:ゆっくりやりますと著作権のいろんな仕組みが人間の目で見える仕組みになるわけですけれども、これ目に見えないスピードで全部やりますので、人間が著作権保護ができているのかできていないのか分かんなくなる。内々でいろんなことをやれば、著作権保護ができるようにいろんなことを工夫して埋め込むこともできる。
高橋:つまり1回しかコピーできないようにするとか、そういうシステムを作れるということですか?
石川:1回しかコピーできないようにするのは無理なんですけど、これはコピーしたものであるかどうか、それが機械の中で2回目の場合には駄目だとか、こういう場合は駄目だということを機械の中に埋め込めばできるようになる。
高橋:人間のほうは意識しないで済むと、そういうことをね。次から次にいろんな応用の研究が見えてきて非常に画期的で、まだまだお話伺いたいと思いますけれども、一旦ここでコマーシャルを入れます。コマーシャルです。
~CM~
高橋:「科学朝日」本日のゲストはこの方、東京大学大学院教授の石川正俊さんをお迎えしております。これまで高速ビジョンチップを使った様々な応用例を見てきたんですけれども、先生はそもそもこの画像処理の研究を始められたのはどういう思いからなんですか?
石川:はい。元々は脳の情報処理の様式を工学的にどう作ればいいかという話をしていたんですね。それからその後今度は人間の動態計測、動きですね、人間の動きの計測をやっていた。そこでロボットのセンサーっていうことで、脳を勉強して、人間の動きを勉強して、じゃ、ロボットということになったときに、どうも機械は人間よりも速く動きそうだということで、速く動かそうと思ったんですが、力センサーと触覚センサーはどうにか速くできた。ところが視覚センサーは周りの人が全部ビデオ映像の30分の1秒を使っている。30分の1秒でやるとこうなりますという論文は山ほどあるんですけれども、わたしの感覚は機械ってもっと速いだろうと。もっと速く動く筈だろうというので、ビジュアルフィードバックというんですが、視覚の情報を使ってロボットを動かすという研究をしたときに、視覚を速くすれば、もっと正確にいうと、視覚をそのときもうできている力のセンサーや触覚のセンサーと同じスピードで動かせば、もっとすごいことができるだろうというふうに考えたのが始まりですね。
高橋:じゃ、その当時の視覚のセンサーというのは、ビデオカメラにあるセンサーということだったんですか?
石川:はい、そうです、そういうことです。30分の1秒でしたね。
高橋:ビデオカメラを作るときは、常に人間が30分の1秒の能力なんだからそれがあれば良いやということで作ってきたわけですね?
石川:それ以上のスピードは見せても、人間が見えないので。
高橋:意味がないからって、開発してこなかったわけですね?
石川:でも機械の立場になってみると、機械はもっと速く動くのでもっと情報が得られさえすれば機械が速く動く筈だと。実際力センサーと触覚センサーはそれで動いている、ならば視覚もという。ところがその視覚を速くするということをやっている人が少なかった。スローモーションに興味のある方はよくやられたんだけれども、それは処理を含まない話なので、視覚の情報処理を速くしようとやっている方がいない。わたしが始めた頃は、30分の1秒は高速だといわれていた。
高橋:そうなんですか。
石川:30分の1秒で画像処理ができるということは、すごく速いといわれていたんですが、その時代にわたしは30分の1秒じゃ遅いと。もう異端児扱いなんですね。1,000分の1秒でやるとどうなるかなというのを考え始めて、最初の5~6年は物ができていないので何もできなかったんですけど、物ができて動き始めるといろんなことができ始めたということなんです。
高橋:物を作るのも大変だったんじゃないんですか?
石川:大変だったし、その当時の半導体は集積度が悪かったので、大きなものになっていました。それが段々段々小さくなって。
高橋:大きくても速くできたんですか?
石川:速くはできた。はい。
高橋:大きいと遅いような感じするけど。
石川:いえ、いえ、処理の話なので、処理の部分は大きいといろんな回路が入りますので速くできるんですね、全部並列でやるので。それを5年ぐらいは物ができないので何か理由付けをしなきゃいけないということでいろいろ考えて、1,000分の1秒だとものはどう見えるかというのをだいぶいろんな説明をしてきました。バッテイングロボットをご覧いただいたんですけど、バッテイングロボットのボールを例えばプロ野球の1番速い人は150㎞/hで投げると。150㎞/hのボールは30分の1秒で見ると1.4m動くんですね、30分の1秒ごとの映像ですと。150㎞/hのボールをこうやって投げますと、あるときあるフレームではここに得られているんですが、30分の1秒後にボールは1.4m動いちゃうんです。
高橋:そんなに動いているんですか?
石川:そうなんです、そうなんです。
高橋:1.4m先?
石川:になっちゃいます。
高橋:30分の1秒後はね。はい、はい。
石川:え、え。それを1,000分の1秒で撮りますと4.2㎝おきのデータが出るので、この次はこの辺です。そうするとどう動かれても4.2㎝おきのデータが取れますので、ボールの位置は確実に分かるということなんです。そのバッテイングのときには150㎞/hのボールプロ野球のピッチャーという話をしていたんですが、ブラジルのテレビ局からの取材ではサッカーのボールに変わりまして。
高橋:サッカーボールの時速は、やっぱり同じぐらいなんですか?
石川:もうちょっと速いんですけどね。
高橋:あ!そうなんですか。
石川:200㎞/hちょっとだという、その人はそうおっしゃっていましたけれども。それですとゴールの判定ミスがなくなるだろうという。それから最近はですね、ウサイン・ボルトという100mを10秒以下で走る・・。
高橋:はい、はい。この間失格しました、フライイングで。
石川:ウサイン・ボルトが100mを10秒で走るんですが、これ1,000分の1秒で考えますとウサイン・ボルトは10㎜、1㎝しか動けないんです。ウサイン・ボルトは1,000分の1秒には1㎝しか動けないんですが、30分の1秒だと30㎝。そうするとですね、わたしがウサイン・ボルトだとして、この顔があるフレームで撮られました。30分の1秒だとこの顔のこの辺までいくんですね、わたしがウサイン・ボルトだとすれば。そうするとこの顔で処理したことは、この次のフレームでは使えないんです、違うものだと思われちゃうので。ところが1,000分の1ですと、ウサイン・ボルトがこういって次のウサイン・ボルトはこうなんですね。
高橋:はい、はい。
石川:ほんの僅かしか動けない、それが人間の限界なんですね。動けないので、1個前で使った処理が使えちゃうんです。例えばこれをセキュリテイーに使おうとします。ビルに高速のカメラを1台付けますと、ウサイン・ボルトが入ってきました。ウサイン・ボルトが入ってきたんですが、100mを走り抜けるスピードで入ってきました。それを1,000分の1秒で撮るとフレームごと10㎜しか動きませんので、一度ウサイン・ボルトだって分かると、その次のフレームの前の周り10㎜の範囲にある物体はウサイン・ボルトでしかあり得ないんです。ということは、2回目のときに処理しなくていいんです。そこにある物体はウサイン・ボルト以外にあり得ないので、ウサイン・ボルトの顔認識をもう1回やる必要がありません。そうすると処理が簡単になって、また処理が速くなるという。高速の画像処理のポイントはここにあるんです。ものが1,000分の1では動かない、動かないから処理が簡単になるということです。多くの研究者は、高速の画像処理は30分の1秒でも大変なのに1,000分の1秒になるともっと大変だと思います。
高橋:そうですね。データ量がもうすごく沢山になっちゃって、もう手に負えなくなると思いますよね。
石川:そうなんです。でも、実は全く逆なんです。
高橋:なるほど。
石川:全ての物理現象に限界があるので、その限界を捉えるぐらい速く画像処理をやればそういう変なことが起こらないので、処理が簡単になるんです。今のウサイン・ボルトもビルの入り口でウサイン・ボルトだと分かれば、ビルの中を100mのスピードで走られても全部その物体がウサイン・ボルトだというのが物理的に証明できますので、それで処理は簡単になるという。
高橋:なるほどね。
石川:お見せしたビデオは全部それでやっていますので、皆さん「処理大変でしょう、プログラム長いんでしょう」とおっしゃるんですけど、実は全く逆でして、うちのプログラムは皆短い。
高橋:そうなんですか。
石川:それで複雑なことをやりそうになったらば、それは複雑すぎるからもっと速く撮ればそんな複雑なことをやる必要がなくなりますよという話なんです。本をパラパラとめくるのも形状が撮れるのも、あれは高速に撮れるから実は簡単なんです。あれゆっくりやろうとすると、大変なんで。
高橋:そうなんですか。何か本当に逆転の発想という感じですね。
石川:ええ。ロボットにしても最近ロープだとか布を扱うようなロボットを作ったんですが、新体操のロープという技、あれはあのロープを速く動かすと、ロープは綺麗に前の軌跡を追いかけるようになるんです。頭の中であの新体操のロープという技をゆっくりやったらどうなるかと考えれば、全部ダラーと垂れているだけ。
高橋:そうですね、できませんね。
石川:つまりゆっくりやると、ああなっちゃうの。それでそれを意図通りに動かすためには、高速に動かしてある物理現象の限界を越える領域にもっていけばいいんで、そうすると物理は簡単になるんです。
高橋:なるほどね。ここまでいろいろお話伺ってきて本当にびっくりすることばかりです。応用ではもう何か無限にあるような気が致しますが、その中でも先生が特に今後こういう方面の応用が大事だと思っていらっしゃるようなものはありますか?
石川:ええ、幾つかあります。基本は人間の目には見えないスピードで今までの画像処理では遅い、今までの画像処理では限界があると思われてきたところの限界を突破する技術です。今まで速いものがあればもっと違うのになあと思っていた領域に幾つかあります。一つは自動車なんです。自動車の周辺監視、特に前方監視というものを画像でやろうとすると今までは遅くてもどうにかなるアプリケーションしか実現されてなかったんですね。もう少し速いところまで行けますので、これはちょっといろいろな会社とやっていますので、自動車の制御は変わる可能性があります。
高橋:事故を起さない自動車ができるという?
石川:事故を起さないのは簡単な話です。
高橋:簡単、そうですか。
石川:もっとすごいことができると思います。これが一つ、自動車というのは大きいですので。それと自動車がもう少し知能化される筈ですね。それからもう一つは、さっきのウサイン・ボルトのときにもちょっと申し上げたんですけれども、セキュリテイーですね。われわれ変だなと思っているのは、監視カメラの映像っていうのはカクカクカクカクって遅い映像になりますよね。われわれの考え方からすると、画像処理ができてしまえば変なことが起こっていないときには映像を全部捨てればいいので、そうすると貯める必要がなくなる。変なことが起こったときだけ、実は高速に撮る。そうするとその分だけ処理して、このときは変だということが分かれば、その部分だけ蓄えるということができます。そうするとわれわれの感覚からすると、監視カメラは変だと思ったらば、スローモーションで撮るというのが。
高橋:逆なんですね。
石川:逆の発想があって。そんな変なことが起こっていないところは、全部捨てましょうと。今までは変なことが起こっていようが起こっていまいが同じので集めるから、重要なところが飛び飛びになっちゃう。それがもうちょっと変わるんじゃないか。それから処理が全部入りますので、ビルの中に多くのカメラが入るので、いろんなトラッキング技術が上手くいくだろうと。それからプライバシーの問題も上手くいくだろうと。
高橋:その捨てることによってですね?
石川:捨てることによって。
高橋:はい、はい。
石川:それから3番目、これがわれわれとしては最近1番重要視しているのが、今日も幾つかご紹介しましたけれども、ヒューマンインタフェースの中のジェスチャー認識というものなんです。高橋さんがやられたのは、PDAというちっちゃなものに対してなんですが、例えばコンピューターですと、1mバージョンであれとかこれとかっていうのを指先で指示したり。それからもう数m離れますと、3mになりますテレビですね。テレビをあれとかあちらの番組。
高橋:指差すだけでチャンネル変えたり、それできそうですね。
石川:それでこれは少し計算すれば分かるんですけれども、遅い画像処理でやりますとなかなか難しいんです。難しいことがいっぱい出てくる。速くすると簡単になる筈です。速くすると速くしたなりの別な問題は起こるんですけど、処理は簡単になるという。
高橋:いやあ、でも、そうやってどんどん機械の能力が上がっていくとね、これまあ昔からいわれてきていることですけども、「2001年宇宙の旅」とかああいうSFで繰り返しテーマになっているのは、コンピューターのほうが人間に敵対するんじゃないかと。人間より超えた知性を持った、知性といっていいのかよく分かりませんけれども、知能を持った機械ができてしまう。そのときに本当に大丈夫なんですかというのがどうしても心配になるんですけれども、そこところを先生は何か対策を打っていらっしゃるんですか?
石川:はい。今のところは機能的には限定されたものが人間よりも超えているということなんで、人間の全体像は超えていないので、今直ぐ急にということはないんですが、将来像としては十分あり得る話です。高度な高次の機能まで全部高速化されますと人間を超える可能性がありますので、それに関しては何らかの対策が必要ということで、われわれの研究室ではエシックス、倫理ですね、ロボットが高速化された場合の倫理ということに関しても一緒に並行して研究しています。国際会議も開いてロボットや新しい知能っていうものの倫理の問題に真剣に取組んでいます。
高橋:何を1番気を付けなければいけないんですか?研究者として気を付けるべきことってありますよね。
石川:作ってはいけない機能というのがある筈なんですね。あるいはある機能を作ったら、それに対してちゃんと防御する、それ以上のことをできないように防御する機能というのが必要だと思うので、これは両方一緒にやらなきゃいけない。
高橋:そうですね。研究を進めるときには、もうとにかく悪影響も考えながら、それを防ぐような研究も同時に進めなきゃいけないということですね。
石川:そうですね。目に見えないロボットができるということは、人間の目には見えないところで。
高橋:そうですよ。何かされちゃうんですよね、恐いですよね。
石川:ええ。ですので、それに対してはどういうような防御の仕組みを作るか、あるいはどこまでを作るべきかという議論はあるべきなんです。われわれの技術からしますとそういうことができてしまうので、それがわれわれ研究者としての倫理、科学者倫理としてはきちんとやっていきたいなというふうには思っています。
高橋:世界最先端を行くということは、そういうことも同時に考える責任があるということですよね?
石川:そういうことです、はい。それを考えずにやりますと、本当に変なロボットができてしまう。
高橋:そうですね。福島第一原発事故に対応するロボットが全部アメリカ、全部と言ったらちょっと言い過ぎなんですけども、アメリカ製が活躍したというんで、多くの方が何かがっかりしたんですよね。日本のロボットが絶対優れているといわれていたのにと。こうやって今要素技術といっていいんでしょうかね、それについては世界最先端レベルの研究をされているということで、今日は日本のロボット研究健在なりという思いを強く致しました。
石川:ありがとうございます。
高橋:目配りしなければいけないこと沢山あると思いますので、是非そういうところも手を抜かずにですね、常に人間の味方であるようなロボットを。
石川:当然だと思います。
高橋:これからも開発していっていただきたいと思います。石川先生、本日はどうもありがとうございました。
石川:どうもありがとうございました。
高橋:「科学朝日」は、WEBRONZAと連動してお送りしております。WEBRONZAでは番組をテキスト化したものをご覧になれますので、是非ご活用下さい。また「科学朝日」へのご意見・ご感想・取り上げて欲しいテーマなども随時募集しています。視聴者との双方向放送を目指す「科学朝日」、次回も是非ご覧下さい。
有料会員の方はログインページに進み、デジタル版のIDとパスワードでログインしてください
一部の記事は有料会員以外の方もログインせずに全文を閲覧できます。
ご利用方法はアーカイブトップでご確認ください
朝日新聞社の言論サイトRe:Ron(リロン)もご覧ください