- 文字サイズ
- 小
- 中
- 大
再生医療技術への応用も期待される日本発の技術だが、いまでは海外が優位に
2018年07月25日
22世紀からやって来たネコ型ロボットの活躍が少年雑誌で連載されだして、もうすぐ50年。現実社会は22世紀を待たずして、ロボットは生物との融合を始めている。
ひと昔前のロボットといえば、工場で単純作業を繰り返すだけの「硬い機械」のイメージだった。人工知能(AI)が体を持たないロボットだとしたら、工場で単純作業を繰り返す硬い機械は、体しかないロボットである。「電気・磁気などを動力源とし、精巧な機械装置によって人間に似た動作をする人形」「目的の作業・操作をコンピューターの制御で自動的に行う機械や装置」……これが辞書に表れるロボットの説明だ。
この旧来の定義を覆すロボット研究が今、日本でも盛んに行われている。
1989年から始まったNHK主催のロボットコンテストは、今も「高専ロボコン」として盛り上がっており、ロボット研究分野に多数の研究者を送り出している。このコンテスト出身者の一人が、新山龍馬・東京大学大学院情報理工学系研究科講師(知能機械情報学)だ。現在、人体解剖学に基づくロボット研究、製作をしている。
勉強よりもロボット製作に没頭していた少年が、ロボコン出場を通じて早くから気付いていたことがある。それは「ロボットにもしなやかさが必要ではないか」という発想だ。そこで高専を卒業し、本格的にロボット工学の道に進んだとき、この発想を確かめるために最初に作ろうとしたのが「ネコのようにしなやかに動くネコ型ロボット」だった。
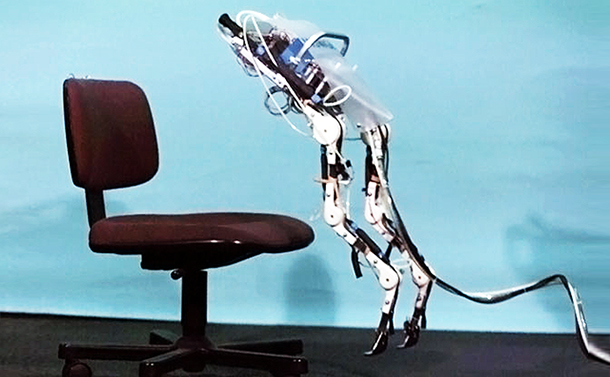 新山龍馬さんが制作した「しなやかにジャンプするカエル型ロボット」
新山龍馬さんが制作した「しなやかにジャンプするカエル型ロボット」これは、生物のある特定の行動だけを追求した結果である。新山さんは言う。「通常、一般的なロボットをしなやかにジャンプさせるには、ヒトでいう腰と膝の関節を個別に制御する必要があるだろうと考える。だが、実際のネコのしなやかさを模倣すると、関節の個別制御は不要だと気づいた。そして筋肉にあたる部分を、硬い金属ではなく柔らかな構造にしたところ、なめらかなジャンプが可能になった」
そして、大きくジャンプしたあと着地の衝撃をうまく和らげて、壊れないような形態を追求した結果、まず最初に到達した形態がカエル型だったというのだ。複雑な運動をするネコのようなロボットを作るには、まず単純な課題を乗り越える必要があるという結論でもあった。
新山さんはロボット工学や人工知能研究の最先端である米マサチューセッツ工科大学(MIT)での研究員を経て、東大講師となった。生物形態へのこだわりが強い彼の研究室には、「走るロボット」の試作品もある。
 圧縮空気で収縮するチューブ状の人工筋肉
圧縮空気で収縮するチューブ状の人工筋肉二足歩行のロボットの構造を見ると、「足底のアーチ(足の裏のカーブ)」があることに気づく。一般の人なら「足の裏をアーチ状にすると、地面との接地面積が小さくなるので不安定になるのではないか」と予想しそうだ。だが、そこに生物のしなやかさを取り入れると、安定して歩行できるようになるという。ここでも、ロボット工学における「しなやかさ」の重要性が浮かび上がる。
現在のやっかいな問題点の一つは、隣り合った人工筋肉同士が歩行時に擦れて傷むことだ。本物の人体では、筋肉はすべて筋膜という線維を含む結合組織で包まれており、表面が滑らかになっているので、擦れても問題はない。だがロボットでこの筋膜の立体構造を再現するのは非常に難しく、悪戦苦闘しているそうだ。実は筆者の専門も解剖学なので、こうしたロボティクスと人体解剖学の共同研究について大いに話がはずんだ。
解剖学的な形態や機能をまねするだけでなく、自己修復の研究も始まっている。たとえば、
有料会員の方はログインページに進み、デジタル版のIDとパスワードでログインしてください
一部の記事は有料会員以外の方もログインせずに全文を閲覧できます。
ご利用方法はアーカイブトップでご確認ください
朝日新聞社の言論サイトRe:Ron(リロン)もご覧ください