- 文字サイズ
- 小
- 中
- 大
あらゆる立体が折り紙で再現可能になる
2018年12月18日
明治大学先端数理科学インスティテュート(MIMS)は、折り紙の工業化を目指している。日本の伝統的な遊びである折り紙を数理的に研究する動きは1980年ごろから盛んになってきた。そのころから折り紙に「設計」という概念が持ち込まれ、90年代からは自動的に展開図を生成するソフトウェアも登場した。こうして、複雑で美しい折り紙作品が続々登場するようになったが、筆者のグループは「軽くて強い」「展開収縮できる」という折り紙の特性を産業界で活用したいと研究を進めている。その一環として、これまでの発想とは真逆のコンセプトで折り紙ロボットを開発しているので紹介したい。
これまでの折り紙ロボットの研究は、器用に折る人の手をロボットに模倣させることを目指したものだった。関連研究は、さながらロボットのセンサーとマニュピュレーターの複雑さの競演の様相を呈し、袋小路に入っている感がある。
そこで我々は、人間並みの器用さを追求するこれまでの研究とは真逆の観点に立ち、ロボットは「折り曲げ」「糊(のり)付け」「持ち替え」機能のみを持つ程度の極力簡易なものとし、代りに折る対象となる紙の形を工夫するというコンセプトを打ち出した。
つまり、「四角い紙を折る」という固定観念を捨て、紙の形はロボットにとって折りやすいものにして、そのうえ糊代も作って糊付けもロボットにさせる。こうして短時間で立体の折り紙を作れるようにすることを考えたのである。
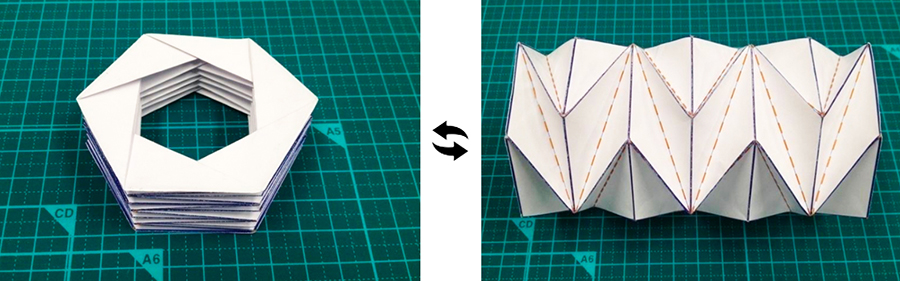 図1:反転らせん型折り紙構造(Reversed Spiral Cylindrical Origami Structure ;RSO)
図1:反転らせん型折り紙構造(Reversed Spiral Cylindrical Origami Structure ;RSO)ポイントとなるのは、ロボットにとって折りやすい「型紙」の設計である。たとえば、
有料会員の方はログインページに進み、デジタル版のIDとパスワードでログインしてください
一部の記事は有料会員以外の方もログインせずに全文を閲覧できます。
ご利用方法はアーカイブトップでご確認ください
朝日新聞社の言論サイトRe:Ron(リロン)もご覧ください